材料牛
首页
科技
导读
顶刊
汇总
综述
干货
业界
会议
活动
观点
项目
服务
视频
活动
招聘
APP
摩擦电-光耦合
导读
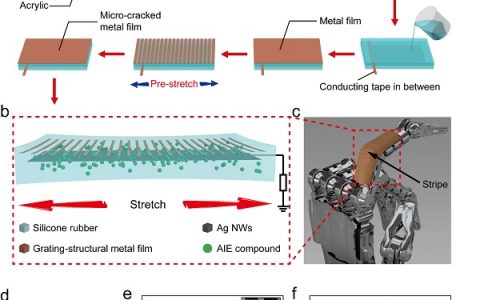
Advanced Materials:可拉伸摩擦电-光智能皮肤用于触觉和手势传感
lixiaoyi
2018-03-17
12.01K
0
0
【引言】 智能皮肤作为仿生机器人与外部环境之间的媒介,需要具备可拉伸性和触觉传感特性,以及测量多种外部机械刺激的能力。近年来,已有多种基于压力传感器的智能皮肤被...
摩擦电-光耦合
王中林
高分子