全文速览
本工作受野生草莓表面多级结构的启发,设计并开发了一款仿生离子电子压力传感器。通过将刚性核果状突起与柔性山脊状结构整合,构建了分阶段连续变形机制,有效突破了柔性压力传感器在灵敏度与检测范围之间的固有权衡瓶颈。该传感器实现了0-3.57 MPa的超宽检测范围,并在两个区间均保持高灵敏度:低压区(0-250 kPa)为445.2 kPa-1,高压区(250-3570 kPa)为188.4 kPa-1,且两段线性良好。经过在976.1 kPa压力下的6000次加载-卸载循环,依然表现出卓越的耐久性和快速响应速度。将该传感器集成到智能手套,并结合网络化识别系统,可对26种手语手势进行识别,准确率达到94%。这一仿生设计能够应对从细微触觉到剧烈机械冲击的广泛力学刺激,为智能可穿戴设备、软体机器人等领域提供技术支持。本工作发表在ACS Applied Materials & Interfaces,第一作者是广东海洋大学沈耿哲博士,通讯作者是广东海洋大学郭福建博士和五邑大学何鑫教授。
研究问题
柔性压力传感器长期受制于灵敏度与检测范围的权衡:低模量电介质虽在低压区灵敏度高,但高压易饱和、量程窄;高模量材料量程宽,却在低压区灵敏度不足。离电型传感器虽依赖电双层效应提升灵敏度,但传统微结构在高压区接触面积趋稳、信号饱和,难以兼顾细微触觉与剧烈冲击检测。
创新方法
本研究受野生草莓“坚硬种子囊+柔软果囊”分层承载结构启发,设计由刚性核果状突起与柔性山脊状分层微结构组成的离子凝胶介电层,形成分阶段连续变形机制:低压时突起优先变形,中高压载荷转移至山脊,超高压全结构协同受力,从而避免接触面积过早饱和,实现灵敏度与量程的兼顾。
性能突破
传感器实现0-3.57 MPa超宽量程,低压区(0-250 kPa)灵敏度445.2 kPa-1,高压区(250-3570 kPa)188.4 kPa-1且双区间线性良好;在976.1 kPa压力下循环加载6000次峰值电容仅衰减约2%,表现出优异耐久性与快速响应。该设计为柔性电子系统构建提供通用框架,可覆盖细微触觉至剧烈冲击的检测需求。
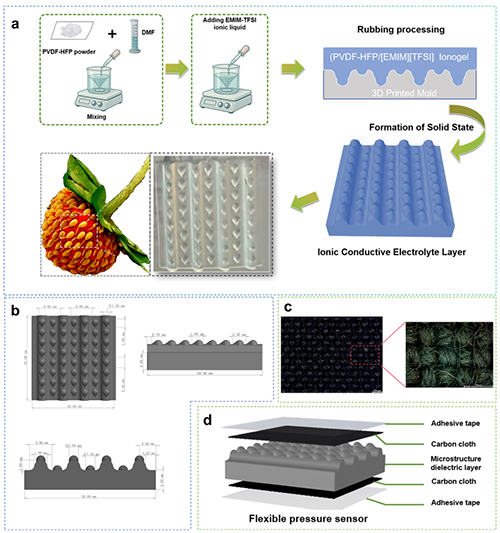
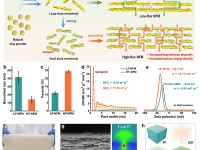
如图1所示,本研究构建了基于草莓表面分层结构的仿生离电压力传感器,展示了分层离子凝胶层的制备过程(图1a)、微结构的尺寸与几何构型(图1b)、导电碳布电极的光学显微图(图1c)及传感器分层组装截面(图1d)。通过3D打印复刻草莓果核形貌的模具制备离子凝胶介电层,并采用“导电碳布/离子凝胶/导电碳布”的夹层结构,电极尺寸略小于介电层以避免短路。这一受自然结构启发的分层设计,是实现传感器兼顾超宽量程与高灵敏度的关键基础。

图2展示了该仿生IPS的机械响应特性,包括不同频率下的电容–压力曲线(图2a)、1 kHz条件下的双区间线性拟合结果(图2b)、应力–应变曲线(图2c)、分层微结构在压力加载下的有限元模拟(图2d)及渐进接触机制的理论模型(图2e)。测试结果表明,传感器在0-250 kPa区间灵敏度达445.2 kPa-1,在250-3570 kPa区间仍保持188.4 kPa-1的高灵敏度。有限元分析直观揭示了“低压突起变形→中压载荷转山脊→超高压全结构参与”的分阶段受力机制,阐释了其突破灵敏度与检测范围权衡瓶颈的力学原理。

图3展示了基于传感器阵列的数据手套智能手势识别系统,包括针对不同手语手势的五通道电容响应(图3a)、系统数据流示意图(图3b)、LSTM模型的训练与验证准确率及损失曲线(图3c-d),以及26种手势的混淆矩阵(图3e)。结果显示,五通道传感器阵列可为不同手部姿势生成唯一的电容特征,经LSTM神经网络训练后,系统对26种手语的识别准确率达94%。这一结果不仅验证了传感器在智能可穿戴设备中的可行性,也体现了其在精准人机交互与手势识别应用上的显著优势。
总之,本研究用分层微结构重塑柔性压力传感器的力学响应路径,在超宽量程内同时保持高灵敏度,突破了该领域的性能权衡瓶颈。结合智能手套与深度学习模型,传感器实现了手语识别等应用,为新一代智能可穿戴、人机交互和软体机器人技术赋予了更广阔的潜力。