在机器人领域,如何实现“像人手一样灵活灵活操作”一直是工程师与科学家的共同目标。尤其在滑动检测、力控反馈等细微动作层面,传统传感器系统仍难以媲美人类的触觉神经系统。即使利用最新的视觉控制技术,也不能比拟人类对切向“滑动”和纵向“压力”变化的精确、快速多模态解析。重要原因在于,当前大多数人工触觉系统无法具备人类皮肤的感受器(mechanoreceptor)功能(如Meissner/Pacinian 和 Merkel cell)对于动态与静态刺激的分工同步应对。
有鉴于此,纽约州立大学布法罗分校刘骏教授团队受人类触觉神经元机制启发,成功开发出一套全新的基于自驱动直流发电效应(Tribovoltaic Effect)的仿生滑动感应系统(BTS):通过将动态直流发电机制引入柔性可穿戴电子织物中,成功构建出具有自供能能力、高灵敏滑动感知与实时反馈调控功能的仿生触觉系统,在无需外部供电的前提下实现高灵敏度滑动检测与反馈调节,系统响应时间可低至毫秒量级,远优于视触觉检测原理。为未来智能机器人抓取、医疗辅助手和人机交互界面提供了全新思路。
自驱动仿生触觉:灵感来自人类皮肤
人类手指中分布着两类关键感受器:快速适应型(RA)与慢速适应型(SA)神经元,分别用于感知“滑动/释放”等动态信号与“压力/抓握”等持续信号。新型BTS系统仿照这一机制,整合了:
- 基于摩擦滑动驱动的动态直流发电原理(Tribovoltaic DC),模拟RA型感受器,响应滑动刺激;
- 柔性电容式压力传感器,模拟SA型感受器,感知持续按压。
两种传感机制协同工作,实现对机器人抓取动作中的“滑-握-抬”全过程的精准编码与响应(图1A~1F),真正意义上重构了“仿人类皮肤”的神经功能。
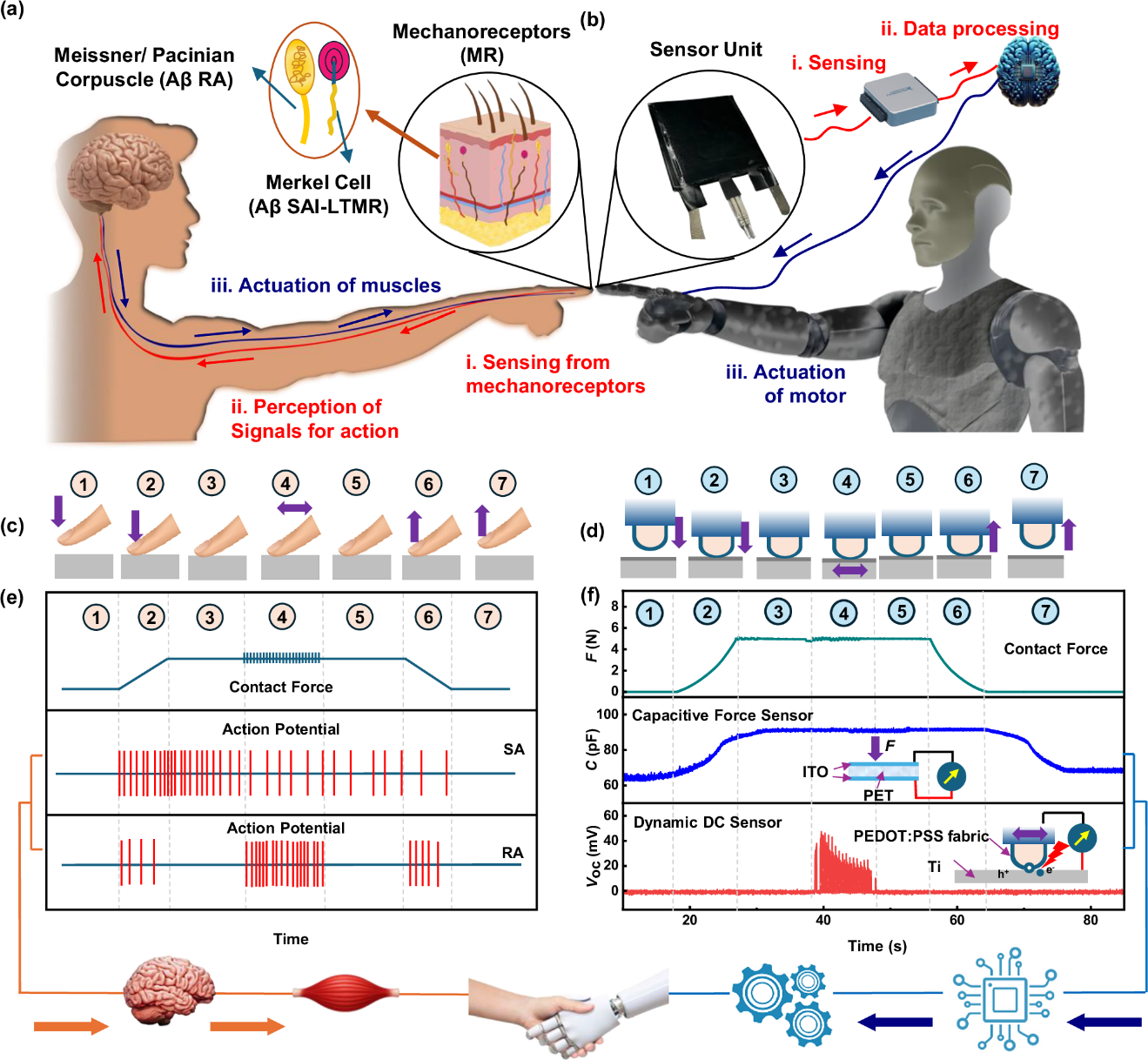
图1. 人类与仿生触觉感知(BTS)集成机器人感知与驱动系统的比较。
高导电可拉伸电子织物:轻柔又可靠
该系统采用三次涂覆处理的柔性PEDOT:PSS导电织物,织物本体由80%聚对苯二甲酸乙二醇酯(PET)与20%氨纶复合而成。每次处理包括溶液浸渍、常温干燥、热压退火,以增强PEDOT: PSS的结合力与稳定性。扫描电镜(SEM)图像显示,导电聚合物包覆层连续、无明显断裂,EDS图谱验证了PSS元素在织物表面分布均匀,导电路径形成有效连续网络。
电学性能测试表明,织物在0%到90%应变区间的电阻变化率小于13%,表现出优良的力学稳定性与导电保持性。该织物与钛金属片在微米尺度接触下形成类肖特基接触,滑动引发局部摩擦电子激发,产生明显的Tribovoltaic效应直流电输出,其电压与滑动速度成正相关关系。优异拉伸性能:应变达90%时电阻变化小于13%;同时,在摩擦界面选择中,相比常用铝片,选用了钛(Ti)金属片,更耐腐蚀、输出稳定性更高(图2H)。
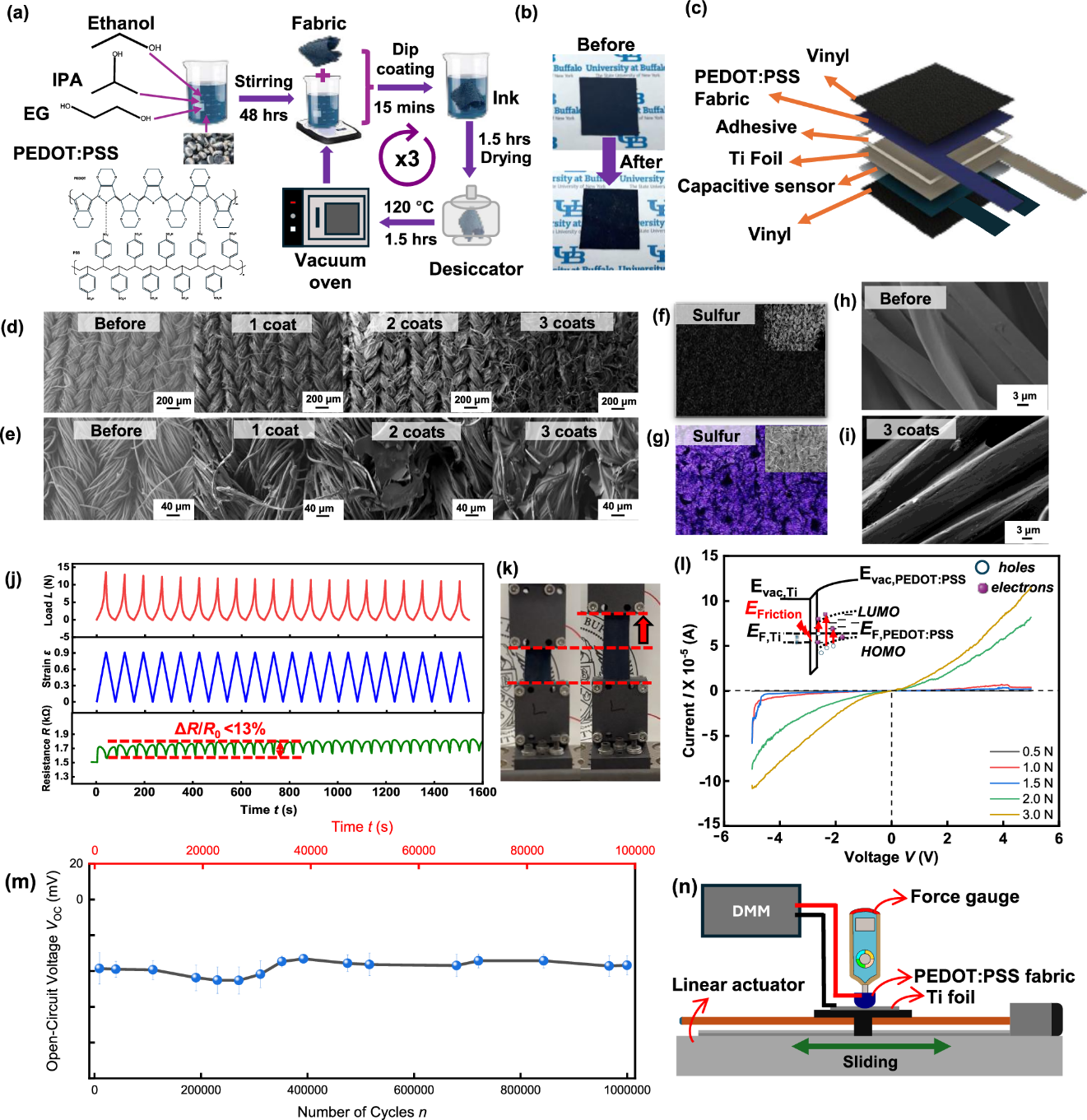
图2. 基于动态直流发电机的自供电传感BTS系统中PEDOT:PSS涂层电子纺织品的制备与表征研究。
动态识别:毫秒级响应构建闭环反馈
BTS系统在滑动刺激下能迅速响应输出电信号,其响应时间约为34 ms,快于人类RA类触觉神经元以及当前GelSight视觉反馈系统(96 ms),更能满足高速抓取中的滑动反馈需求。在模拟抓取实验中,研究者对不同表面材质(如PVC、玻璃、纸板)施加恒压滑动刺激,系统均能识别出滑动起始点与速度变化,并据此调整夹持力。
在“抓取-滑动-释放”循环中,系统输出信号可用于闭环控制指令。研究团队构建了基于传感输出幅值的反馈调控模块:当电压高于阈值,反馈控制器自动增强夹持力,直至电压回落至稳定状态,实现对滑动趋势的主动抑制。这种方式可使物体滑移距离从30 mm 降至4.1 mm,显著提升抓取稳定性。
此外,系统在超过100万次滑动循环实验中表现出极高的耐久性与信号一致性,证明其适用于长时间、重复触觉任务场景。
从仿生传感到机器人控制闭环
更进一步,研究团队基于BTS信号设计了闭环控制算法,将输出信号(Vout)转化为机器人夹持力调节信号,形成“检测–计算–调整”的闭环调控机制,完成自主稳定抓握任务(图3)。
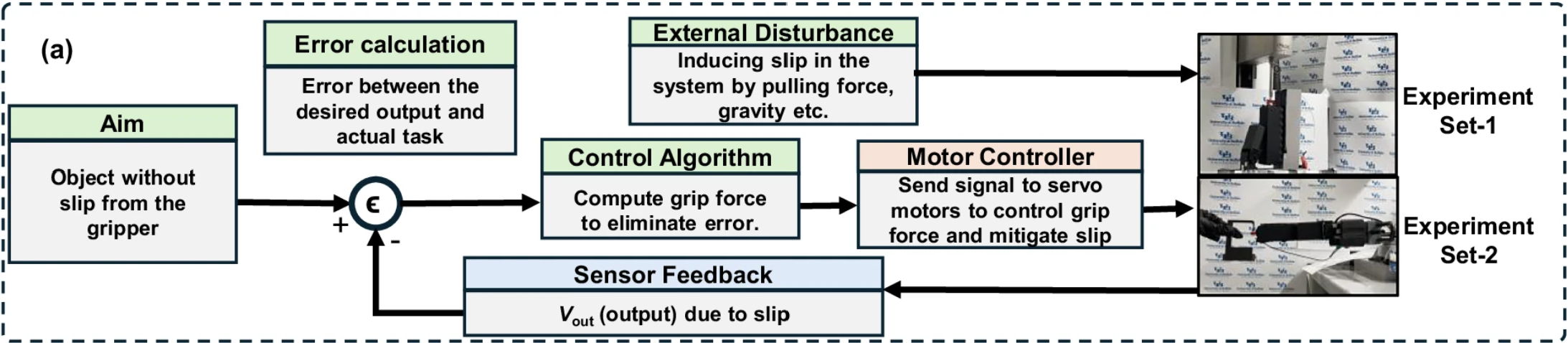
图3. 基于BTS集成的机器人握持器系统的滑移检测与抑制。
图4集中展示了系统在静态加载与动态滑动过程中的电学输出行为。图4B展示了在不同法向加载力(0.5 N、1.0 N、1.5 N)条件下的输出电压,结果显示电压幅值随接触力增加而增强,符合赫兹接触模型对接触面积和应力分布的预测。图4C进一步对比了静态加载与滑动过程中的输出波形,发现滑动状态下信号具有更明显的尖峰特征和上升沿,对应于界面滑移启动过程的快速电荷分离。图4D则绘制了输出电压与滑动速度的关系曲线,呈现出近线性趋势,为后续基于速度-信号映射的反馈控制奠定了基础。
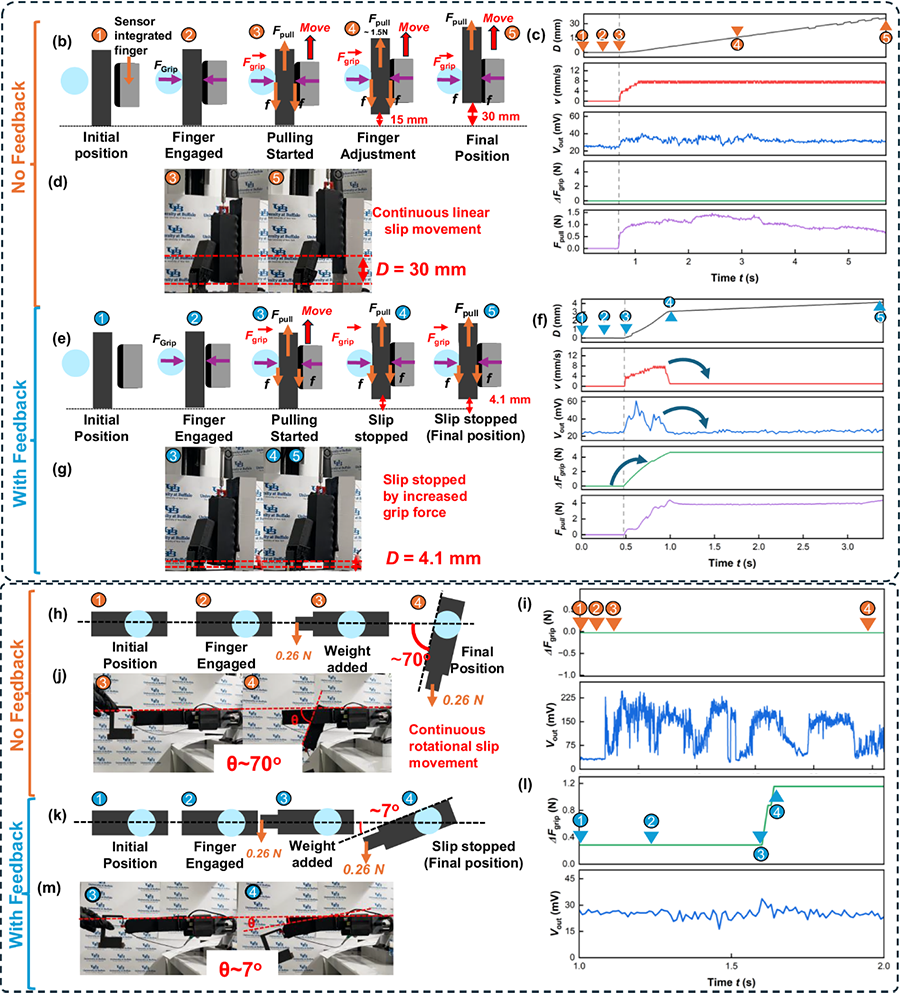
图4. 基于BTS集成的机器人握持器系统的滑移检测与抑制。
多场景验证:不仅抓得稳,还能抓得巧
为了验证BTS 系统在多场景下的工作模式及性能,团队系统性展示了BTS系统在复杂运动场景下的滑动响应性能。其中,图5A为BTS织物与Ti接触构建的仿生传感节点示意图,图5B-C展现了系统在不同滑动速度(20 mm/s、40 mm/s、60 mm/s)条件下的电压响应曲线,表现出良好的线性响应和速度敏感性。图5D演示了非匀速滑动过程中信号幅值的实时变化,图5E则验证了在震动干扰或倾斜角度变化条件下的信噪比稳定性。值得注意的是,图5F所示的重复滑动试验中,系统在10^6次循环后仍保持稳定输出,验证了其高耐久性与稳定性。
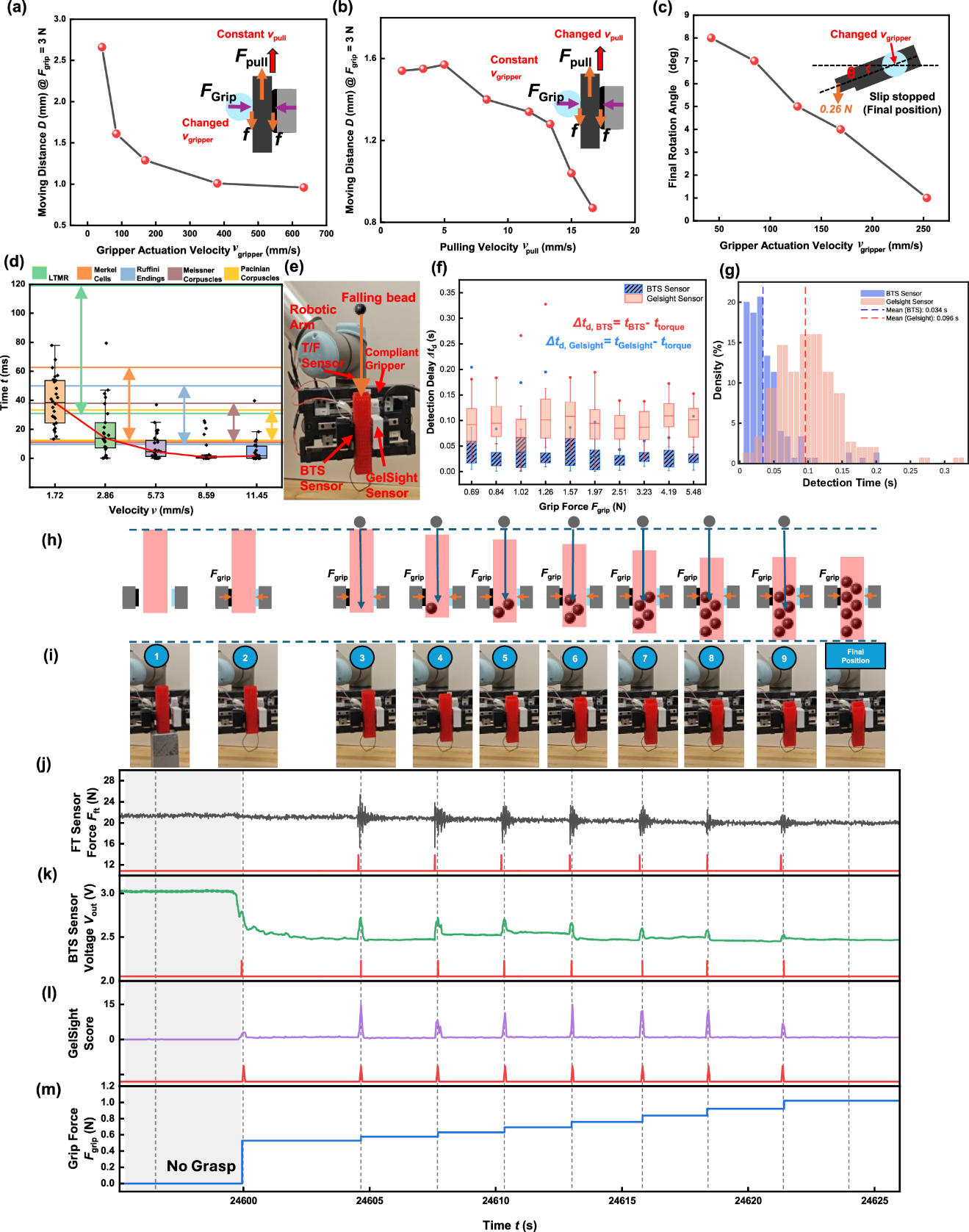
图5. 机器人抓取中的参数化滑动位移检测与抑制方法研究
团队进一步聚焦于系统在机器人抓取任务中的闭环控制表现。图6A为BTS集成至机器人指腹的安装方式,图6B-C记录了抓取物体过程中系统输出电压随握持状态的动态变化。在滑移发生初期(如图5D所示),电压迅速上升触发反馈调节,图6E-F显示夹持力增强后滑移显著抑制,滑动距离从初始的30 mm 降至约4.1 mm。图6G统计了多个材质目标物在系统参与控制与否下的抓取成功率对比,进一步地,研究还基于赫兹接触力学模型系统建立了输出电压信号与接触力及滑动速度之间的数学映射关系,为后续构建更高级别的AI力控策略(如强化学习)提供了理论基础,强化了BTS系统在闭环控制算法中的适配能力,证明该策略对多目标抓取的广泛适应性与显著增益。在多个物体搬运过程中,系统输出的电信号可用于实时调节夹持力,显著降低滑落率。尤其在面对材质柔软或异形结构的目标物时,系统展现出优异的自适应能力与任务成功率。
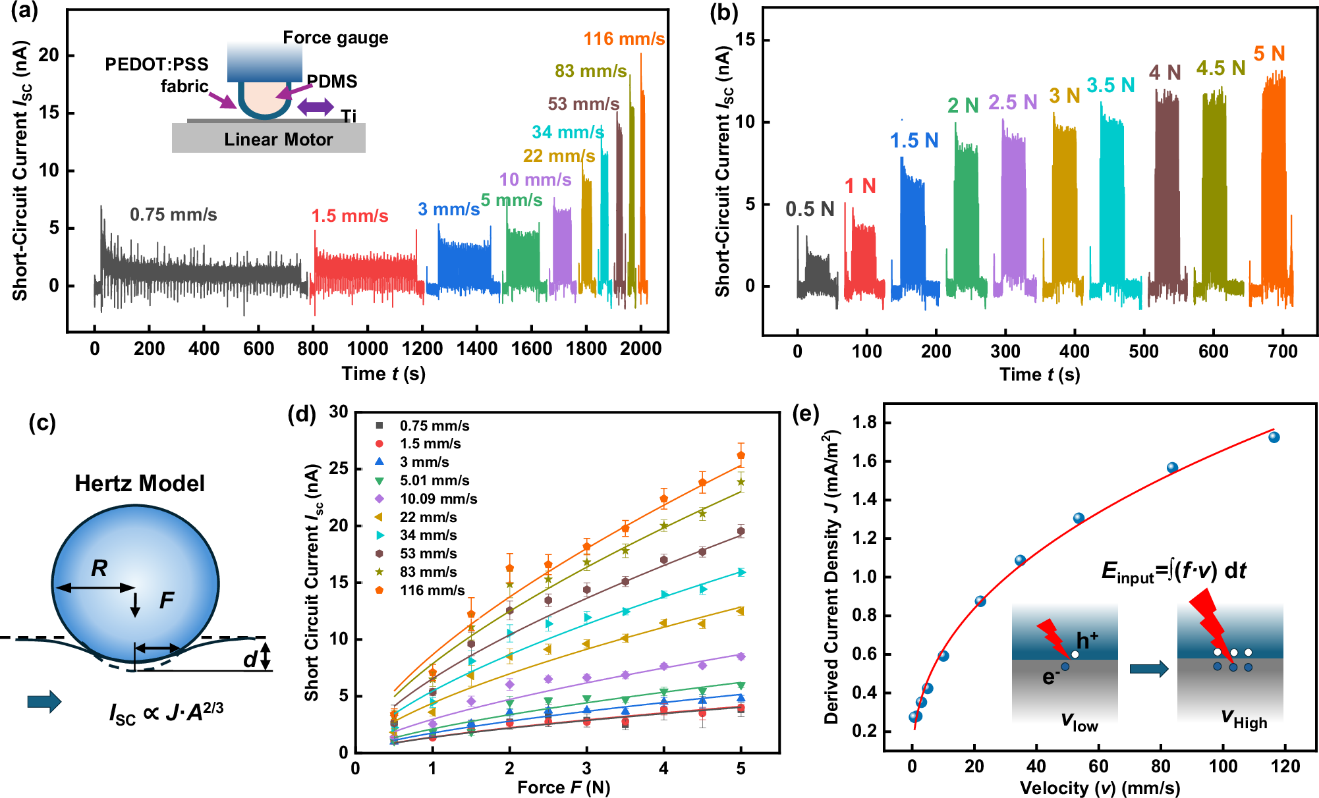
图6. 直流输出随力或速度变化下的定量分析
应用前景与意义
该项研究构建了一种基于结构与信号协同设计的柔性触觉系统框架,其关键优势在于:
- 自供能:无需电源模块,适用于微型或可穿戴设备
- 高速响应:滑动响应<40 ms,优于常规视觉与热敏系统
- 柔性集成性强:可直接贴附于衣物、机械臂、义肢表面
- 制造兼容性高:材料廉价、工艺通用、可扩展性好
因此,该系统在机器人,生物电子/医疗等领域具有广阔应用潜力:通过将BTS系统集成于仿生义肢表面,可实现接近人类皮肤触觉的感知功能,有助于恢复截肢患者的触觉反馈与操作精度;在微创手术或远程操控中,系统的高灵敏滑动检测能力能够帮助操作者感知组织接触状态,提高手术安全性;在仿生机器人与分拣装配系统中,BTS模块可赋予机器人如人类般的抓握判断力,有效防止物体滑落或抓握失误;此外,将其作为皮肤感知单元贴附于人体关键部位,还可用于构建可穿戴人机交互界面(如电子皮肤),实现细微滑动、碰触识别,为手势识别与虚拟控制提供基础。
刘骏教授简介:
刘骏博士现任美国纽约州立大学布法罗分校机械与航天工程系助理教授、博士生导师,纽约州立大学环境、水与能源研发中心(RENEW Institute) 研究员,同时兼任Wiley出版社Energy Technology期刊副主编、TouchTronix Robotics公司创始人。刘骏博士2018年5月于加拿大阿尔伯塔大学化学与材料工程系获博士学位。刘骏博士目前的研究方向主要集中在机器人触觉传感器与视觉-触觉数据融合,及其在灵巧操作、人机交互方面的运用,先后在Nature Nanotechnology, Nature Communications, Science Advances, Matter, Nano Letters, Advanced Functional Materials, Nano Energy 等国际顶尖期刊发表学术论文五十余篇,并申请美国/国际专利多项。刘骏博士曾荣获2021索尼创新科学家奖(Sony Faculty Innovation Award)、2020 Nature Springer微系统与纳米工程青年科学家奖(MINE Young Scientist Award)、2019美国扫描探针显微镜论坛最佳研究成果奖、加拿大阿尔伯塔省创新-未来科技局(AITF)研究生奖、中国国家自费留学生奖学金等诸多奖项。他曾多次在美国材料协会(MRS)年会、国际光电工程协会(SPIE)、国际纳米能源与系统会议(NENS)等业内重要会议上做特邀报告。其产业化成果获得美国自然科学基金创新企业项目(NSF I-corp) 和纽约州立大学产业加速计划 (Accelerator Program) 专项支持,并担任多家高新技术企业技术或战略顾问。
参考文献
Gautham, V., Panpalia, A., Manouchehri, H. et al. Slip-actuated bionic tactile sensing system with dynamic DC generator integrated E-textile for dexterous robotic manipulation. Nat. Commun. 16, 7005 (2025). https://doi.org/10.1038/s41467-025-61843-6