在软体机器人领域,如何实现无线且精准的变形控制一直是核心难题。近日,来自英国布里斯托大学(University of Bristol)的研究团队在《Advanced Materials》上发表论文,提出了一种能够在外部电场作用下产生大幅形变的新型软体材料——电致变形凝胶,论文第一作者为徐慈群博士。该材料在驱动机理与应用拓展方面均取得突破,为软体机器人的驱动提供了新路径。研究成果已被作为正封面文章刊登。

一、电场驱动的新原理
传统软体机器人依赖磁场、光照或热刺激驱动,但存在响应慢、系统笨重、控制精度有限等问题。研究团队提出以电场-介电耦合为核心的驱动思路:通过外加电场诱导材料内部电荷分布变化,实现快速、可逆且多维的形变。论文中展示的电致形变凝胶由弹性体基质、介电液体和纳米级碳颗粒组成。当外部电场施加时,碳颗粒间形成暂态电流通道,局部极化导致材料产生宏观应力差,从而实现形变。这种机制不同于传统电活性高分子的离子迁移驱动,具有更高的响应速度与可控性。
二、可编程变形与运动模式
团队通过设计不同几何电极与场分布,实现了多模态运动:
• 伸展-收缩模式:材料在交替电场中呈周期性扩展与收缩;
• 旋转-翻转模式:非对称电极诱导局部扭矩,实现平面或空间旋转;
• 爬行-跳跃模式:电场梯度驱动材料沿基底推进并跃起;
• 多体协同模式:多个 机器人单元在相同场域内可独立响应,实现群体运动。
与磁驱动相比,电场控制系统质量更轻、功耗更低、控制分辨率更高。同时无需在材料内部嵌入线圈或永久磁体,为微型化与可穿戴化应用提供了可能。
三、从仿生到功能:多场景展示
在论文中,研究者展示了多个仿生原型:
• “蜗牛”型机器人能在平面间隙间伸展并跨越障碍;
• “体操运动员”模型可在悬空下摆动前进;
•管道运动装置展示了其在狭窄空间中的运动能力。
所有运动均基于非接触电场驱动,无需嵌线或外部电源连接,充分体现了材料的高柔性与系统独立性。
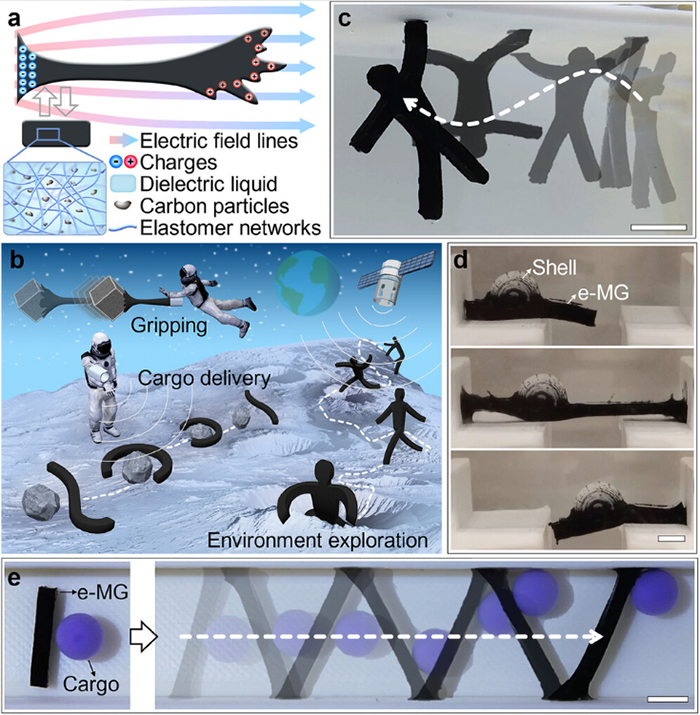
图1 软体机器人的形变能力展示。a.材料的结构。b.未来太空应用场景。c. 体操机器人。d. 蜗牛机器人。e. 在狭窄通道中运送货物。
四、潜在应用与前景
1. 航天探索:利用电场驱动在真空中工作的特性,可用于航天器维护与样本采集。
2.微操作:可实现低功率、高精度的柔性抓取。
3. 智能材料系统:与柔性电子或传感网络结合,有望构建自适应可变形结构。
研究者认为,电场驱动不仅能轻量化系统,还能提供更高的控制精度与能效。这为智能软体机器人的发展开辟了新的方向