研究背景
兼具优异弹性和抗疲劳性能的轻质多孔气凝胶,在软体机器人、航空航天和柔性电子等相关领域展现出重要的应用潜力。弹性决定了材料在大变形条件下的可恢复能力,而抗疲劳性能则反映了其在循环加载过程中抵抗累积损伤和结构退化的能力。然而,在极限应变条件下,气凝胶的弹性与抗疲劳性存在此消彼长的矛盾,这使得同时具备两种特性成为一大挑战。
仿生和结构工程的方法被认为是改善气凝胶机械弹性的有效途径。例如,通过可逆的物理相互作用构筑柔性网络,可实现大形变下的弹性恢复,但在循环加载过程中,结构单元之间的弱相互作用易导致结构松弛与累积损伤,表现为抗疲劳性能的快速衰减。借鉴天然材料的有序结构,精准调控结构单元取向,已被证明有助于面内应力的有效分散,以实现气凝胶抗疲劳性能的提高。遗憾的是,现有策略往往只能在某一性能维度上取得突破,仍难以在极限应变条件下同时实现高弹性和出色的抗疲劳性能。
文章概述
近日,王双飞院士团队受跳蚤弹性蛋白垫取向层级结构的启发,提出一种共价桥接协同纤维流剪切的策略,以同时提高气凝胶在极限应变下的弹性和耐疲劳性。基于该策略制备的摩擦电气凝胶,经历99%的压缩应变后可恢复性高于95%,且在90%的压缩应变下能承受20,000次的循环,是目前所有报道中最好的弹性材料之一。以此开发的摩擦电裂纹传感器表现出超快响应(68 ms),并且在超过10,000次循环中保持稳定的电信号响应。这项成果以题为“Ultraelastic bioinspired triboelectric aerogels enabled by covalent bridging”发表在国际学术期刊《Matter》上。2023级博士研究生赵佳敏为本研究的第一作者,聂双喜教授为通讯作者,罗斌、蒙香江、刘涛、张松、王金龙、迟明超、蔡晨晨、刘艳华、于康等参与研究,广西大学为唯一完成单位。
图文导读
1. 仿生设计灵感
自然界中,跳蚤展现出了令人惊叹的运动能力,其垂直跳跃高度可达自身身体长度的数百倍。这一卓越运动性能,是依赖于后腿基部特有的弹性蛋白垫作为能量存储与释放单元。该弹性蛋白垫能够在高频、反复压缩—回弹循环过程中长期保持结构完整性而不发生疲劳失效。这一优异力学表现主要归功于其内部高度取向且具有层级分布的微观结构。该结构不仅有利于在动态载荷下实现应力的快速分散,还能够在大变形过程中有效抑制局部应力集中,从而确保跳蚤在数以万次的跳跃过程保持稳定。通过模仿跳蚤弹性蛋白垫的高取向层级结构,利用共价桥接协同纳米纤维流剪切策略,获得的仿生摩擦电气凝胶在超大应变条件下仍表现出近乎完全的弹性恢复能力和卓越的抗疲劳特性。
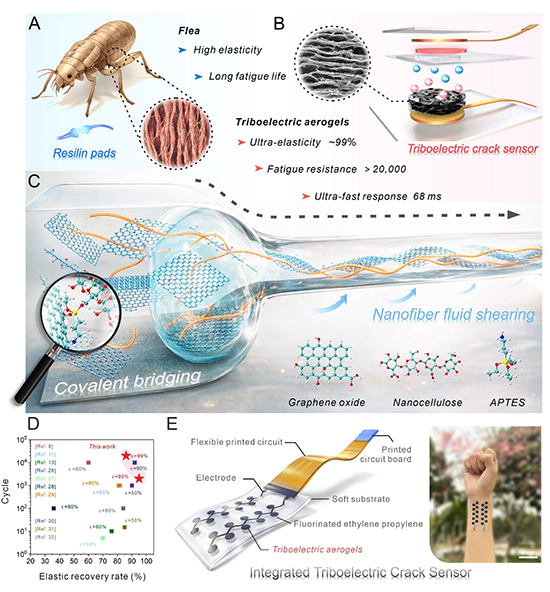
图1. 仿生摩擦电气凝胶的设计灵感。
2. 共价桥接协同纤维流剪切策略
将三氨基丙基三乙氧基硅烷(APTES)共价接枝在无序的TEMPO氧化纳米纤维素纤维(TOCNF)上,接着通过同样的缩合反应桥接氧化石墨烯纳米片,以此在两者之间形成稳定的“共价键桥梁”。随后,纳米纤维素在流体剪切力的作用下发生流动。根据流变学的经典理论研究,在外力作用下假塑性流体流动时,散乱的链状分子因受到层流的剪切力作用,构象被迫发生改变,发生剪切稀化行为。这种剪切力往往会使聚合物链沿着流动方向对齐,体系的构象熵减小,黏度降低。实验结果表明,该气凝胶前驱液符合经典假塑性流体的流变特性,纤维素纳米纤维在流体剪切过程中可以通过“共价桥梁”诱导氧化石墨烯纳米片实现对齐。
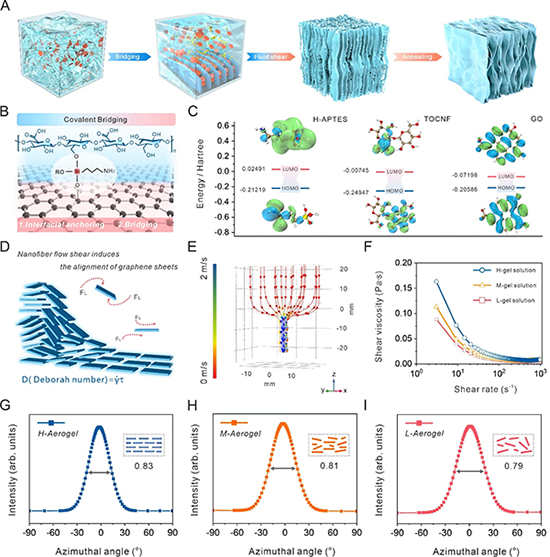
图2. 共价桥接协同纤维流剪切策略。
3. 仿生结构赋予的机械韧性
通过对摩擦电气凝胶机械特性的测试,可以分析其仿生结构与性能之间的关联。原位扫描电子显微镜与有限元分析结合,直观地显示出气凝胶在压缩-释放循环过程中片层及其微观结构的变化。循环压缩测试结果表明,摩擦电气凝胶经历99%的压缩应变后可恢复性高于95%,且在90%的应变下能承受20,000次的循环压缩。
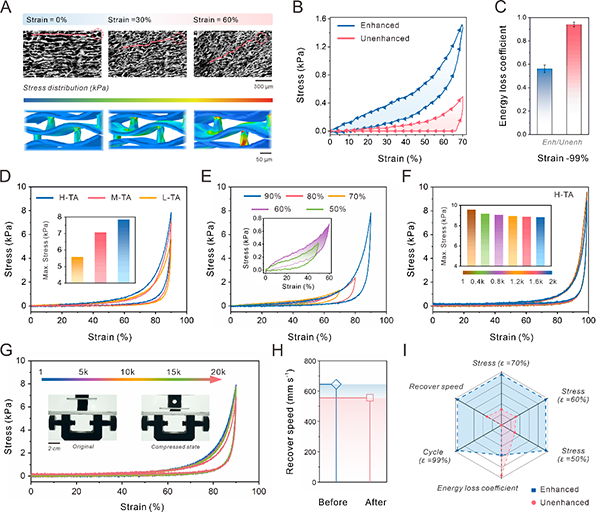
图3. 仿生结构赋予的机械韧性。
4. 摩擦电裂纹传感器的设计与应用
基于接触起电和静电感应效应的耦合,本文以仿生摩擦电气凝胶为核心材料设计出一种灵敏的摩擦电裂纹传感器。该摩擦电裂纹传感器展现出对两种不同压力范围的适应性。在压力区间0.3 kPa-2.1 kPa时,灵敏度为1.85 kPa-1,当压力大于2.4 kPa时,摩擦电裂纹传感器展现出高水平的灵敏度(8.49 kPa-1)和极高的线性相关度(R2=0.995)。响应时间是分析传感器性能的关键指标,该摩擦电裂纹传感器的响应时间为68 ms,这要比人类对外界压力刺激的响应时间更快(139 ms)。长时间运作过程中,传感信号的稳定至关重要。在经历大于10,000次的循环测试后,传感器的电信号响应没有显著变化。
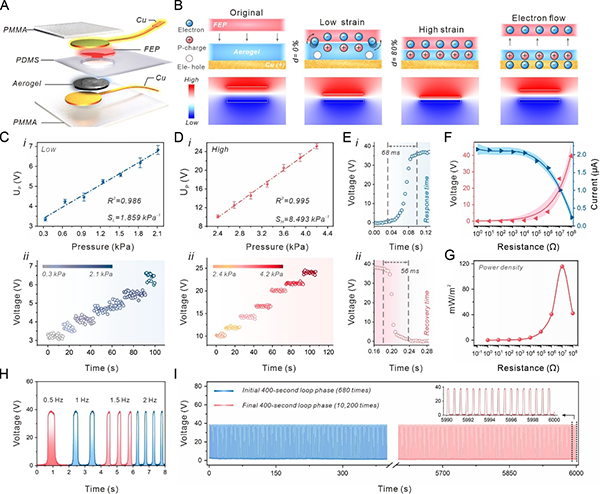
图4. 与仿生结构关联的摩擦电传感机制。
每年有数百万人葬身于交通事故,而疲劳驾驶是导致交通事故频发的主要人为因素。疲劳检测方法主要分为三类:车辆特征、驾驶员的身体特征和生物学特征。本文拓展设计了一种用于预测疲劳驾驶的集成式摩擦电裂纹传感器。该系统完整的设计思路如图5所示,集成式摩擦电裂纹传感器可分别收集驾驶员的生理信号,包括心率、手腕和脚踝的活动,这些信号综合分析可以客观反应驾驶员的驾驶状态。随后,将收集到的信号进行短时傅里叶变化(STFT)并将获得的时频图进行多模态特征融合。具体而言,将彩色时频图转换为单通道灰度图,随后沿通道维度拼接生成一个融合的RGB图像,每个模态对应一个通道。结合预训练的卷积神经网络(CNN)模型,可以实现对驾驶员驾驶状态的识别。
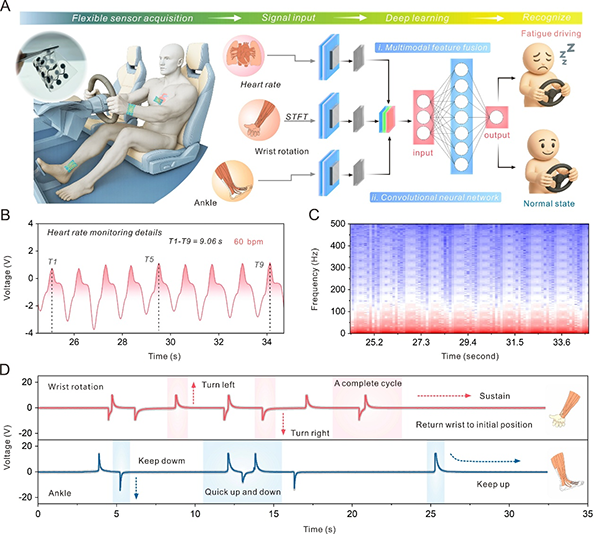
图5. 集成式摩擦电裂纹传感器用于驾驶疲劳预测。
结论
本文通过共价桥接协同流体剪切策略设计了一种高性能仿生摩擦电气凝胶。该气凝胶展现出卓越的机械性能,尤其值得注意的是,在极限压缩应变下仍具备出色的弹性和抗疲劳性能。此外,基于该气凝胶制备的摩擦电裂纹传感器表现出高水平的灵敏度、快速的响应与恢复时间以及长久的使用寿命,这为疲劳驾驶预测系统的发展提供了良好的契机。该仿生策略有望在生物医药工程、生理健康监测以及柔性电子学等领域推动结构工程材料的应用。
原文链接:https://doi.org/10.1016/j.matt.2026.102770