多模态柔性触觉传感器(Multimodal flexible haptic sensors, MFHS)凭借其对复杂机械刺激(法向力/剪切力、动态/静态)及非接触目标感知特性,在下一代智能机器人的灵巧抓取、人机协作等前沿领域展现出广阔的应用前景。这类多模态传感器不同于传统的单一模态传感器,具备多模传感信息感知能力,为实现从基础力学感知向高度集成的智能触觉系统进开辟了新的路径。然而,如何在器件结构层面实现复杂多模信号的高效解耦,并在此基础上构建兼具优异机械顺应性与智能信号处理能力的触觉感知系统,依然是该领域亟待突破的关键科学难题。
近日,河南大学柔性电子学院黄维院士团队张洪健教授课题组在国际权威综述期刊《Progress in Materials Science》(影响因子:40)发表综述论文,概述了柔性多模态触觉传感器的最新进展。该论文题为“Toward the intelligent robotics era: Multimodal flexible haptic sensors for advanced perception systems”,河南大学柔性电子学院张洪健教授以及黄维院士为通讯作者,硕士生丁思理和助理教授徐峰为第一作者,河南大学柔性电子学院和河南省柔性电子产业技术研究院为第一通讯单位。
该综述总结了MFHS的最新研究进展,重点关注传感材料与机制、器件结构、信号处理以及系统级集成。此外,综述总结了机器人触觉感知和人机交互领域的代表性应用,旨在为该跨学科领域提供参考与展望。综述的结构如下:第二章阐述了多模态触觉传感的核心材料与物理机制,并基于“制备-结构-性能”的系统框架,全面总结了六类传感材料的设计策略。第三章重点介绍了多模态触觉传感器的器件结构设计,详细阐述了动态/静态多模态力感知、法向力/切向力多模态力感知以及接触/非接触多模态感知。第四章概述了多模态触觉传感的信号处理与系统集成,首先介绍了放大电路、滤波电路和信号解耦方法等基本信号处理策略,随后讨论了包括模数转换、数据通信在内的系统集成方法,接着介绍了机器学习算法在触觉信号处理中的应用。第五章介绍了MFHS典型应用场景,例如机器人抓取、物体识别及人机交互。最后,第六章总结了目前多模态柔性传感器发展中的局限性,并展望了未来的研究方向,为智能机器人触觉感知系统的发展提供参考。
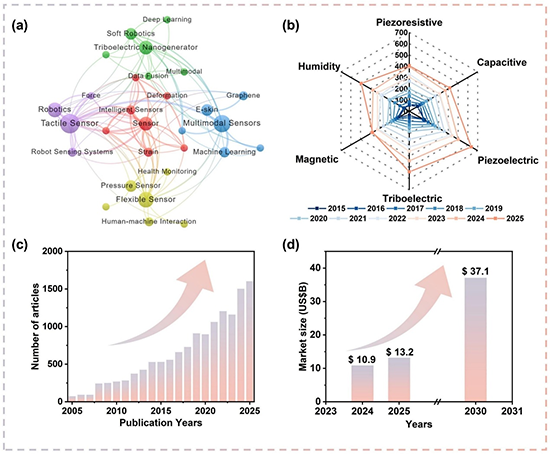
图1. 多模态触觉传感器 (MFHS) 的研究趋势、文献计量分析和市场预测。
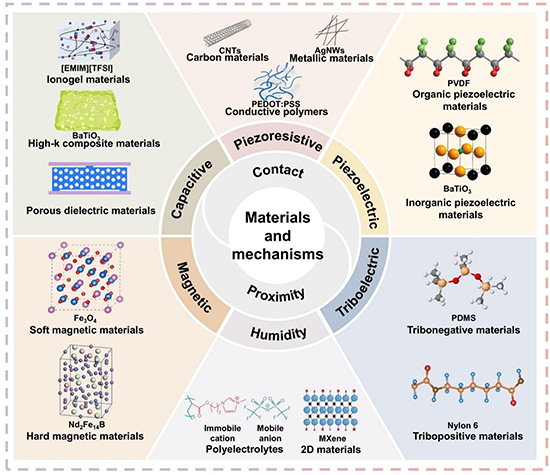
图2. MFHS的基本传感机制和代表性材料的示意图。
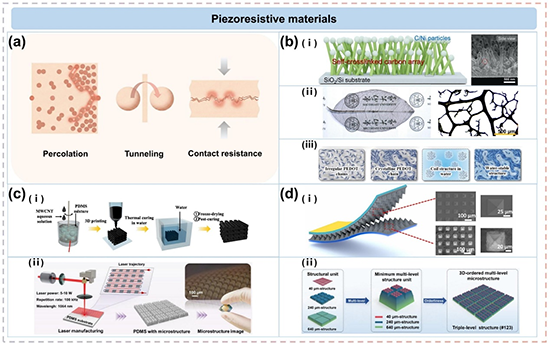
图 3.压阻材料
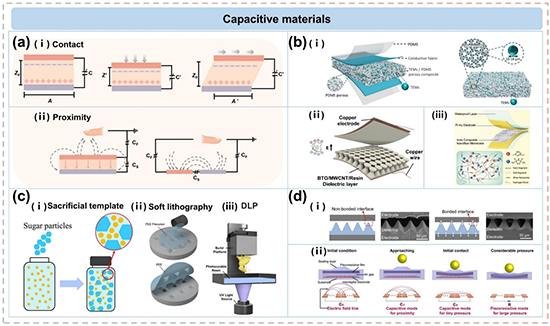
图 4.电容材料。
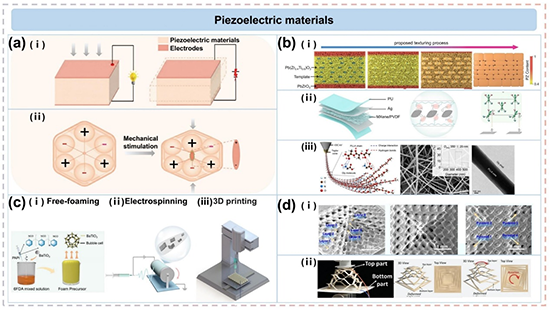
图 5.压电材料。
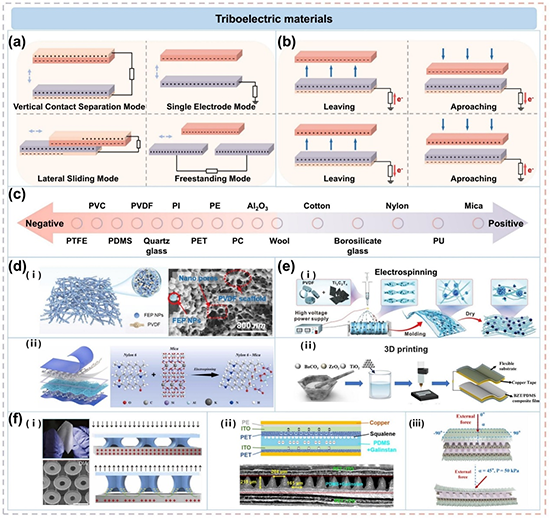
图 6.摩擦电材料。
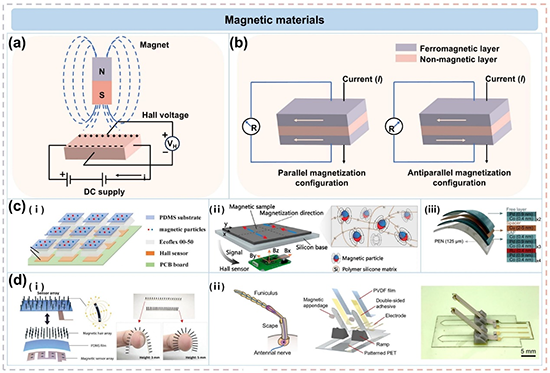
图 7.磁性材料。
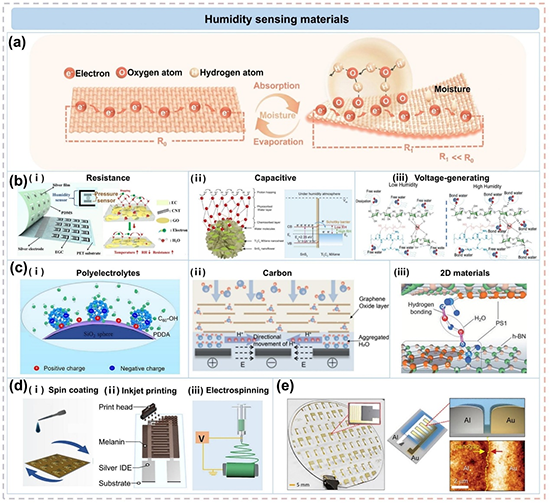
图 8.湿度传感材料。
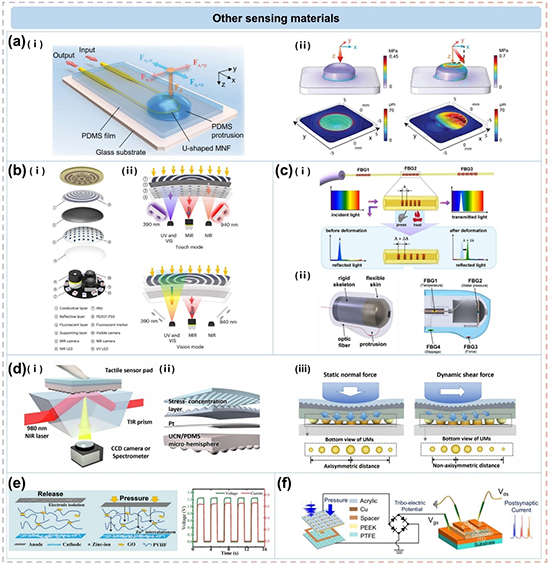
图 9.其他传感材料。
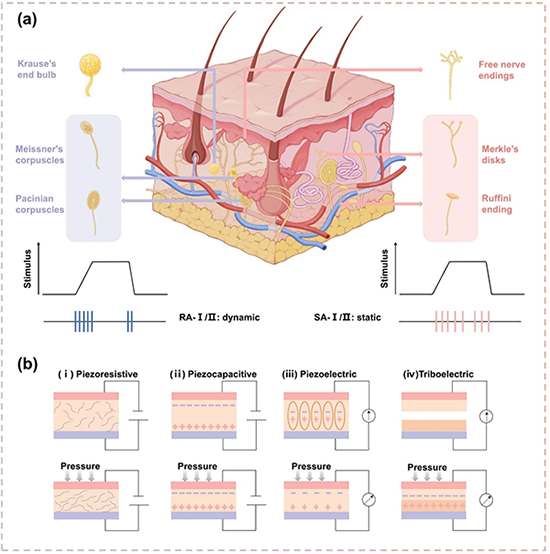
图 10.仿生触觉传感机制。
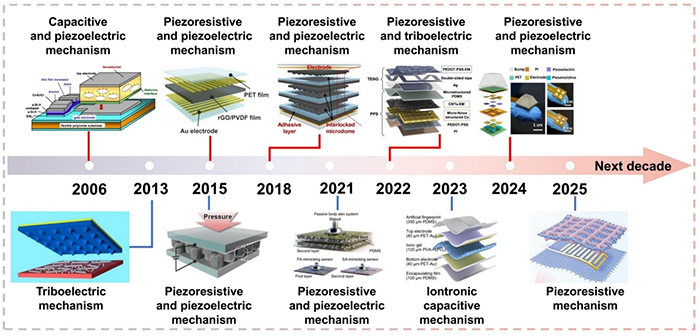
图 11.动态和静态多模态触觉传感器的发展时间线。
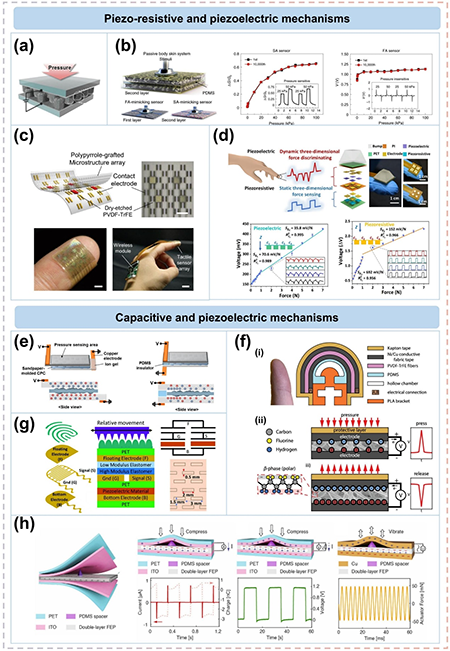
图 12.基于压阻/电容和压电机制的动态/静态多模态感知传感器。
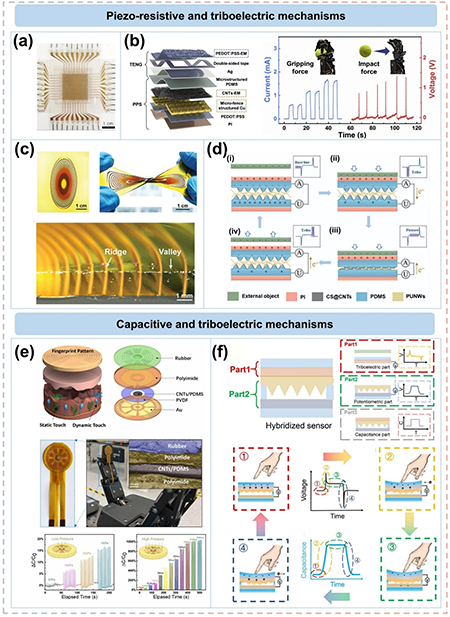
图 13.基于压阻/电容和摩擦电机制的动态/静态多模态感知传感器。
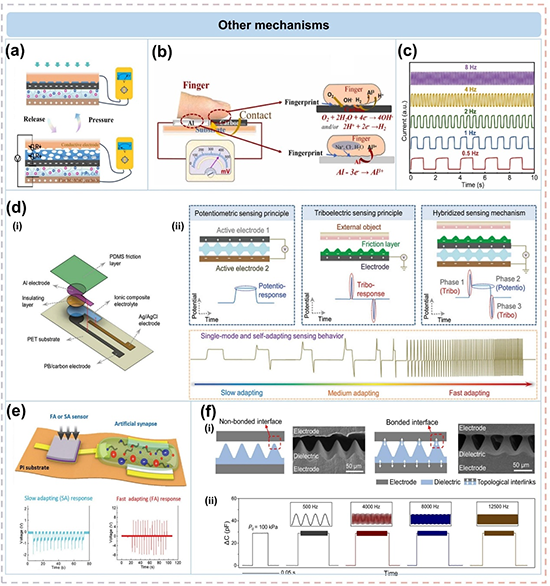
图 14.基于其他机制的动态/静态多模态感知传感器。
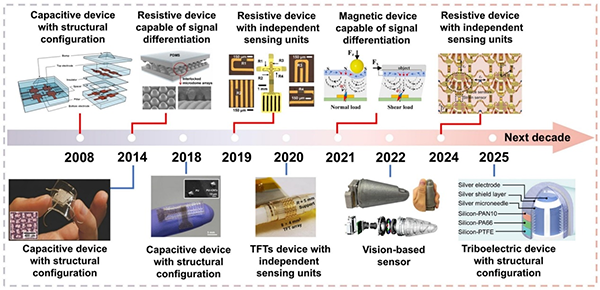
图 15.多维触觉传感器发展时间线。
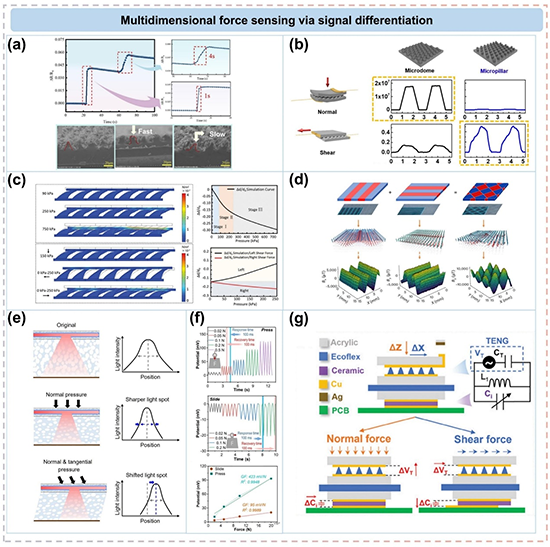
图 16.基于信号差异的多维力传感器。
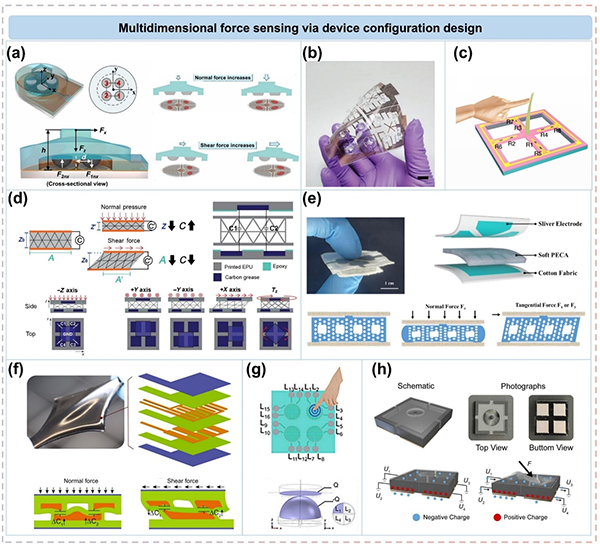
图 17.基于器件结构设计的多维力传感器。
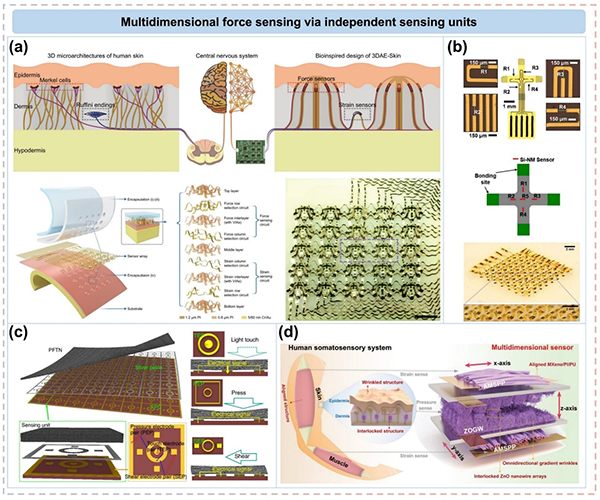
图 18.基于独立传感单元的多维力传感器。
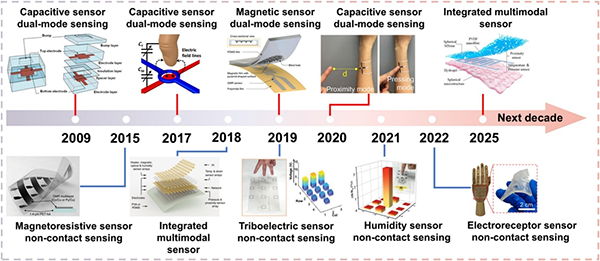
图 19.接触式/非接触式多模态触觉传感器的发展时间线。
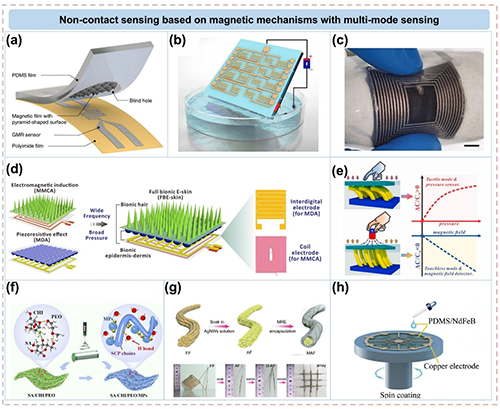
图 20.基于磁机制的多模态非接触式传感。
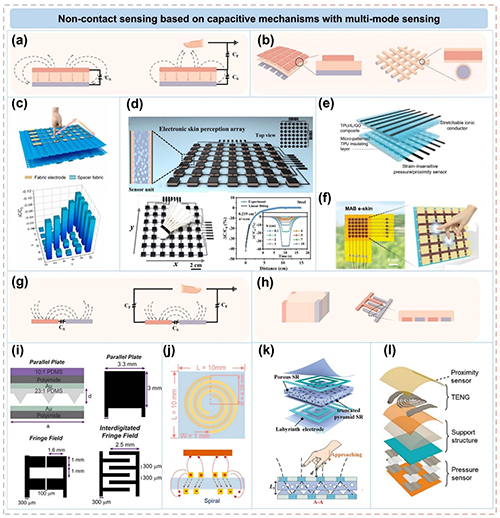
图 21.基于电容机制的多模态非接触式传感。
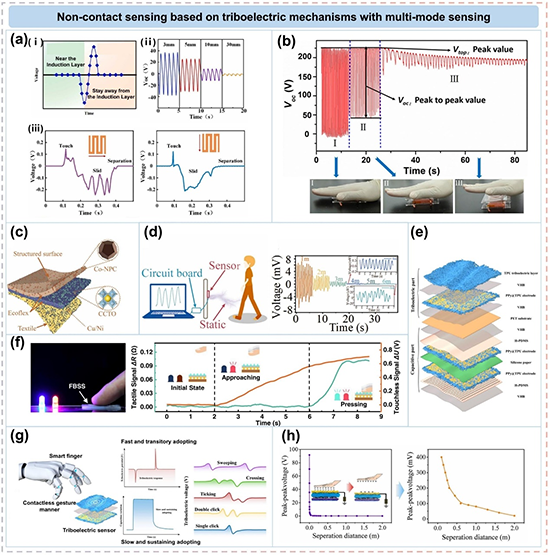
图 22.基于摩擦电机制的多模态非接触式传感。
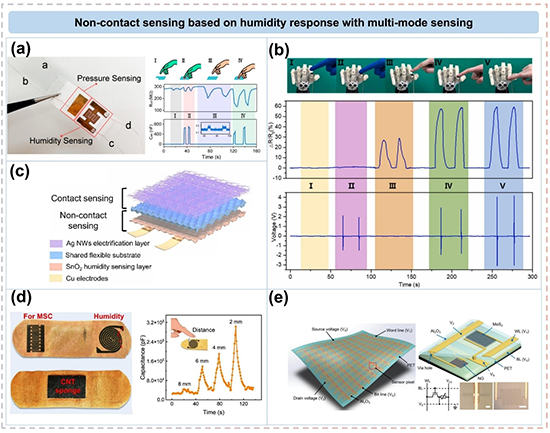
图 23.基于湿度响应的多模态非接触式传感。
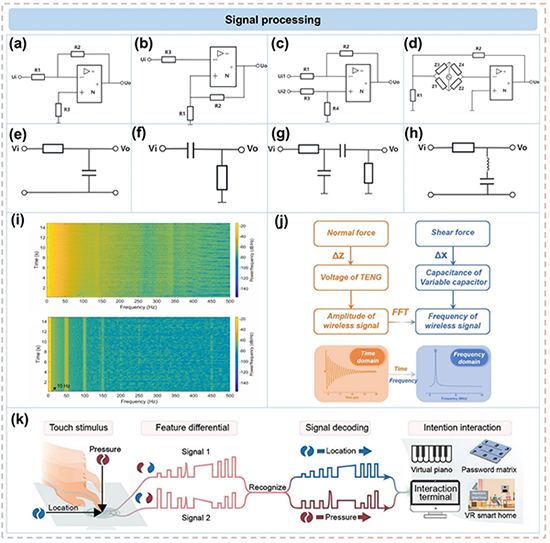
图 24.触觉感知系统的信号处理。
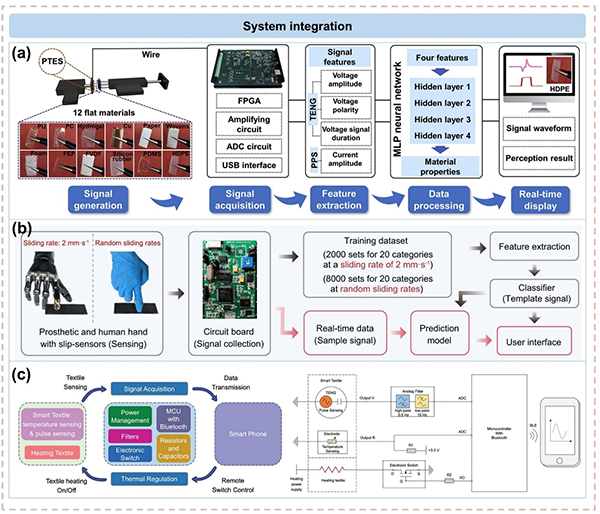
图 25.柔性多模态触觉传感平台的系统集成。
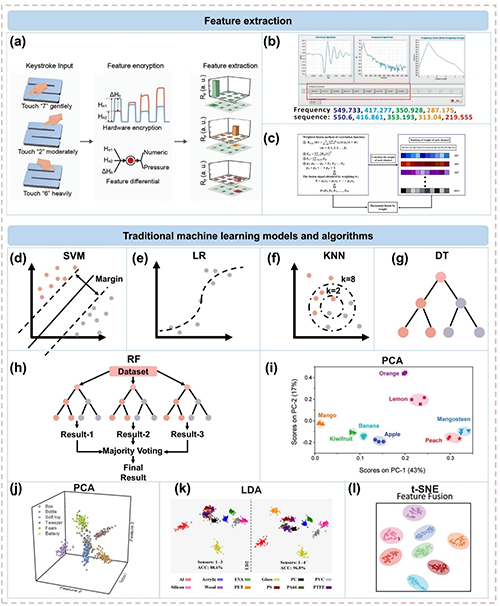
图 26.信号特征提取及传统机器学习模型和算法的系统分类。
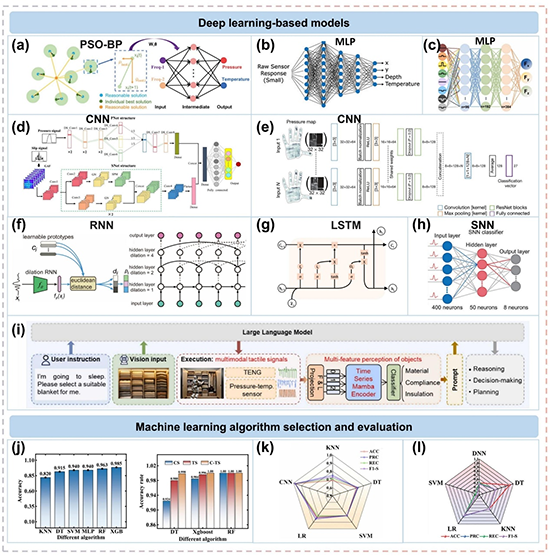
图 27.基于深度学习的模型分类以及机器学习算法选择和评估方法。
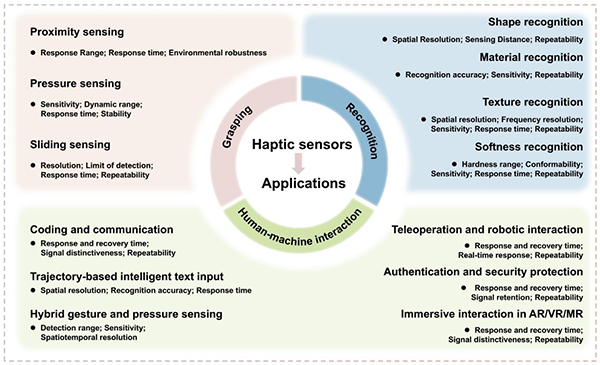
图 28.触觉传感器的典型应用场景和关键性能指标概述。
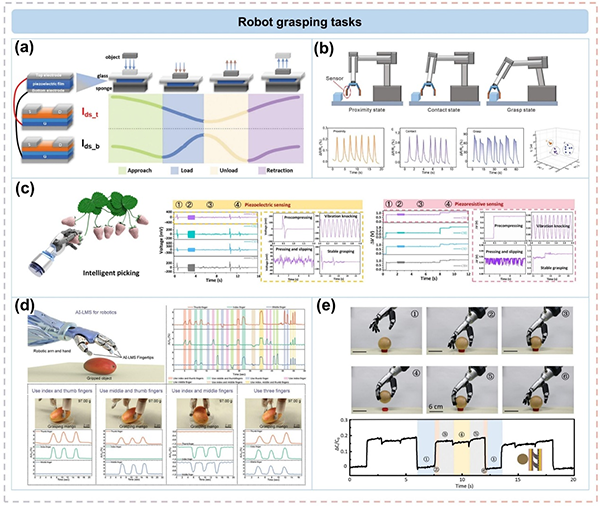
图 29.机器人抓取任务。
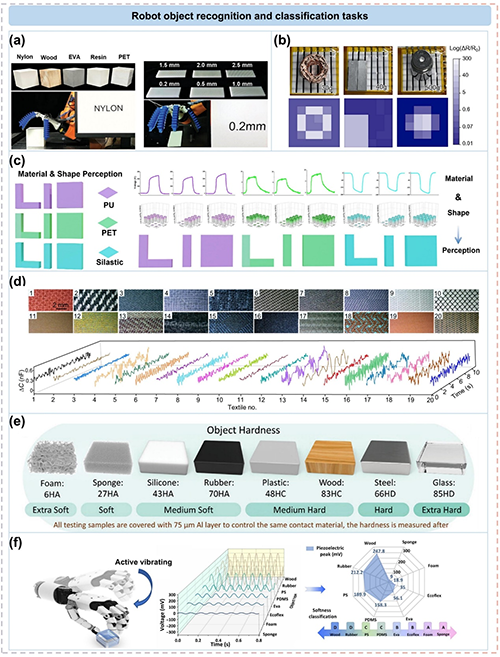
图 30.机器人物体识别和分类任务。
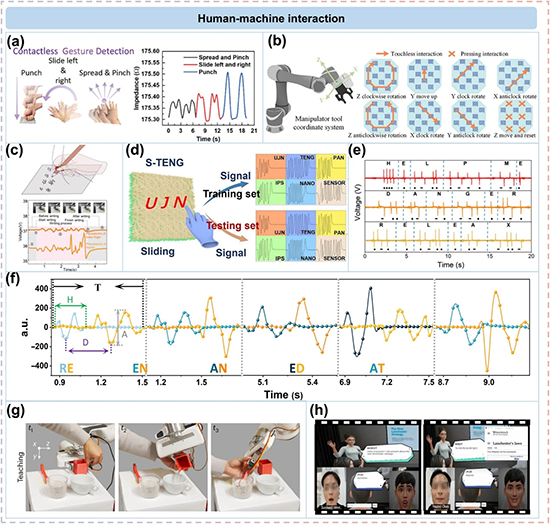
图 31.人机交互。
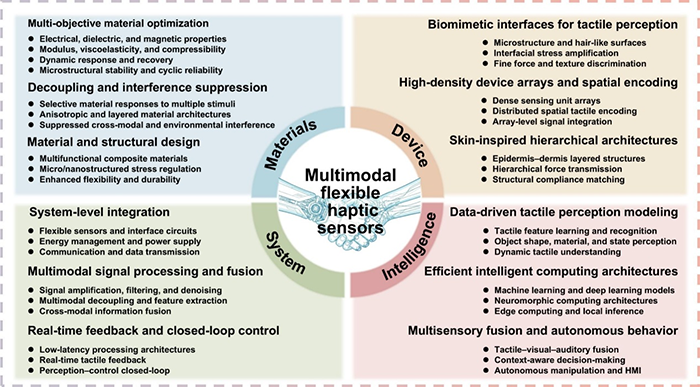
图 32.多模态柔性触觉传感器的综合框架。
本研究得到了国家自然科学基金,教育部基础学科和交叉学科突破计划,中国博士后科学基金,河南省高层次人才计划,河南省科技研发计划联合基金,河南省科技攻关项目,河南省高等学校重点科研项目等项目的资助。