当材料会“思考”:超材料机器人正在改变未来!
超材料机器人(Metamaterial Robotics):让材料本身承担感知、驱动、控制等机器人核心功能,让机器人更轻、更灵活、更智能。
这是由来自瑞士洛桑联邦理工学院和日本東京大学的Xiaoyang Zheng和Jamie Paik所主导团队最新发表于 Science Robotics 的综述文章所介绍一个正在快速崛起的新方向。
什么是超材料机器人?
超材料是一类通过微结构设计获得特殊力学性能的材料,比如:
- 被压时反而横向收缩(负泊松比)
- 一按就能“跳变”的多稳态结构
- 像折纸/剪纸一样自由重构
- 对光、热、磁场等响应的智能材料
这些材料让机器人:
- 不用复杂电机也能实现多自由度运动
- 身体自带“传感器”与“控制逻辑”
- 结构轻、柔软、安全,但功能更强大
三大核心设计思路
文章总结了超材料机器人最关键的三类设计原则:
① 结构力学
通过点阵结构、负泊松比、多稳态结构实现轻量、高强、快响应。
② 形状重构
用折纸(origami)、剪纸(kirigami)、模组化设计,让机器人能折叠、展开、变形。
③ 材料驱动功能
利用光、热、电、磁等刺激响应材料,让机器人“自动动作”和“自动感知”。
AI 让材料更聪明
AI 可以:
- 自动生成具有特定功能的微结构
- 预测材料和机器人的复杂变形
- 帮助机器人学习控制策略
未来的机器人不再只靠电子系统,而是材料 + 结构 + AI的深度融合。
未来
超材料机器人将进化为:
- 身体就是计算单元
- 动作和智能从材料中涌现
- 集群机器人可像蚂蚁甚至人类一样自组织
- 适应极端环境、自动学习、自动重构
这将重新定义机器人的形态与智能来源。
文章链接:https://www.science.org/doi/10.1126/scirobotics.adx1519
Xiaoyang Zheng*, Yuhao Jiang, Mustafa Mete, Jingjing Li,Ikumu Watanabe, Takayuki Yamada, Jamie Paik* (2025). Metamaterial Robotics. Science Robotics, 10(108), eadx1519.

图1 超材料机器人的发展时间线

图2 人形超材料机器人的概念图

图3 超材料驱动机器人的三大核心设计机制
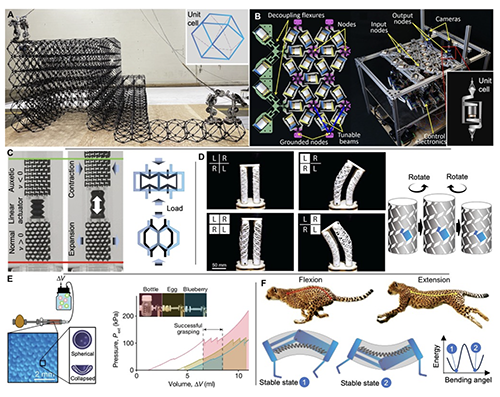
图4 基于结构力学驱动的超材料机器人
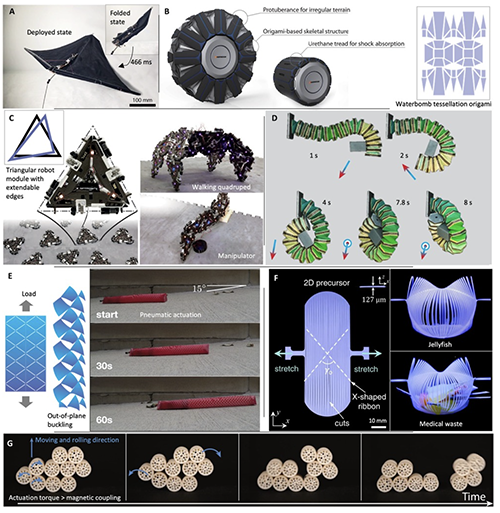
图5 基于可重构结构的超材料机器人
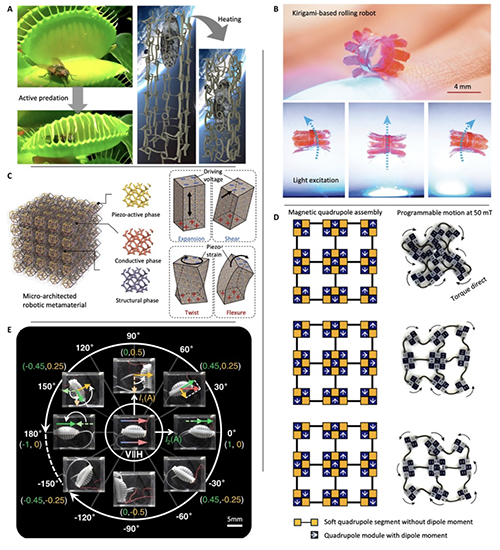
图6 基于智能超材料的超材料机器人

图7 基于多材料超材料的超材料机器人