苏州大学李相鹏、孙立宁教授团队联合中国科学技术大学张世武教授、澳大利亚新南威尔士大学唐诗杨教授、伍伦岗大学李卫华教授、西北工业大学肖冰教授等国际联合团队,受变形虫捕食行为启发,成功研发出一种基于功能液态金属的通用抓手(LiMU)。该抓手通过电化学与磁场协同调控,实现了从皮克级到百克级物体的超柔顺抓取与主动释放,在微纳尺度物体操控中释放加速度高达42 G,刷新了机器人释放速度的世界纪录,操作接触压力低至10 Pa,为已有报道中的最低水平。这一突破性成果为机器人微操控提供了全新范式。LiMU抓手集超柔顺、多尺度、快速响应、环境自适应于一体,在活体生物样本、单细胞操作、微纳组装、深海探测等领域展现出广阔应用前景。相关研究成果《Liquid metal universal grippers for gentle, adaptable, multiscale manipulation》已于近日发表于国际权威学术期刊《Nature Communications》。

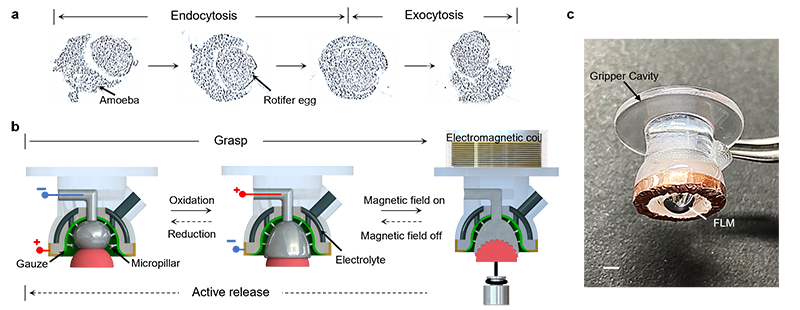
图1 LiMU抓手设计及其表面张力调控机理
表面张力调控实现“弓弩式”主动释放
传统机械抓手在释放微米级物体时,常因范德华力、毛细力等微尺度效应而难以脱离。LiMU抓手首次揭示了一种基于表面张力调控的主动释放机制:通过电化学还原使液态金属恢复高表面张力,形变后的液态金属如同拉满的弓弩,在毫秒级时间内将包裹的微小物体“弹射”出去。
实验显示,对于直径70微米、重0.05毫克的人类发丝,LiMU抓手可在6毫秒内将其加速至696毫米/秒(约8700倍体长/秒),峰值加速度达42 G。这一指标不仅远超现有机器人抓手,也位列自然界生物与人工致动器中的最快释放速度之一。
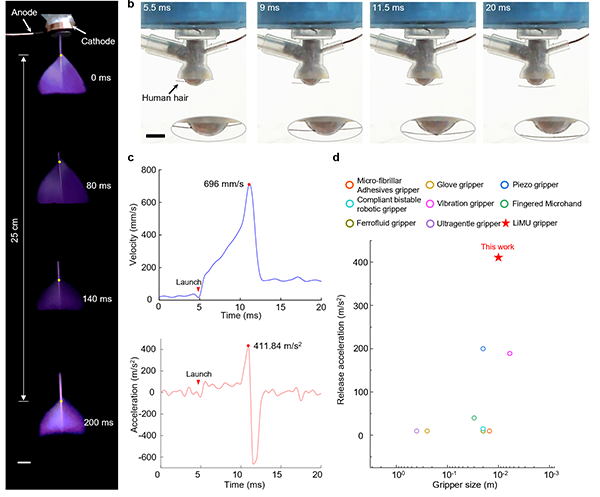
图2 LiMU抓手主动释放
横跨14个数量级的多尺度操控能力
得益于液态金属表面张力的宽范围调控(从约700 mN/m降至接近零),LiMU抓手可实现对从10⁻¹²克(皮克级)到10²克(百克级)物体的稳定抓取与释放,覆盖了微纳颗粒、生物细胞、电子元件到日常物品的全尺度范围。研究中,抓手成功抓取了微型LED芯片(0.1 mg)、玻璃微纤维(0.58 μg)、二氧化硅微球(1.21 pg)等微纳物体,并实现了无损释放。
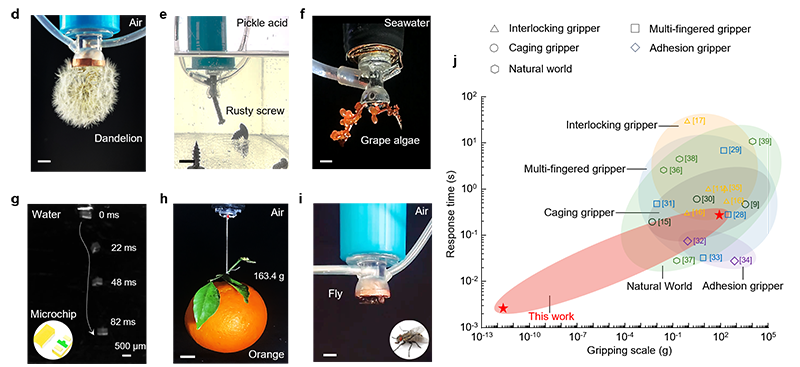
图3 LiMU抓手跨尺度多样操控
超低接触压力与优异生物相容性
LiMU抓手执行操作时的接触压力最低可降至约10帕,为已有报道中的最低水平,远低于大多数脆弱生物组织(如软体动物、豆腐、葡萄藻)的屈服极限。实验中,抓手无损转运日本豆腐、金鱼幼苗,甚至蒲公英花,并对200枚斑马鱼胚胎实现了99%成功率的高效操控,后续发育与对照组无显著差异,充分证明了其优异的生物相容性。
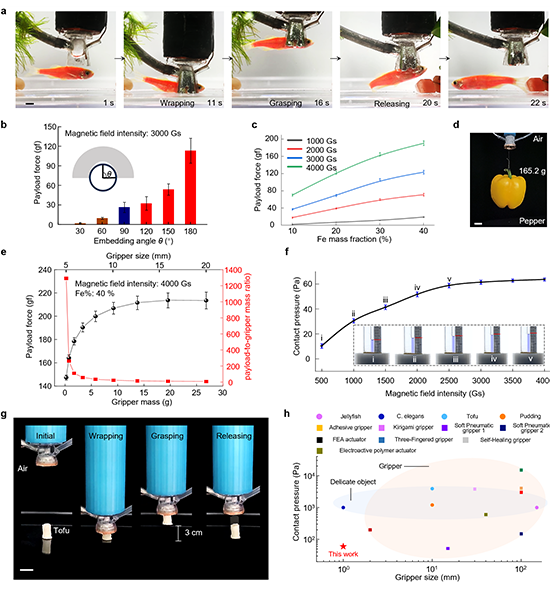
图4 LiMU抓手超低接触压力
环境自适应与毫秒级动态抓取
联合团队设计了一种“环境无关的表面活性调控机构”,通过多孔表面与微通道结构,使抓手在空气、海水、酸碱溶液等多种环境中均能稳定工作。同时,抓手可在200毫秒内捕获快速爬行的蟑螂,并能进行无视觉辅助的无序抓取任务,展现出极强的动态适应能力。
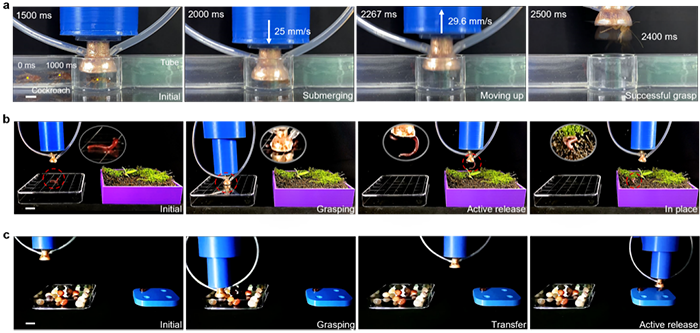
图5 LiMU抓手动态抓取
致谢
该研究工作得到了国家自然科学基金共融机器人重大研发计划(92248302),江苏省杰出青年基金(BK20231522),江苏省高效自然科学研究重大项目(22KJA510006),苏州市科技计划项目(SGC202320)等项目支持。
论文链接:https://www.nature.com/articles/s41467-026-70313-6