研究背景
气凝胶具有高孔隙率、低密度及隔热等独特性能,使其成为颇具潜力的摩擦电传感材料。然而,无序多孔结构会削弱内部相互作用,从而降低材料在应变下的机械强度。无序孔隙结构阻碍了气凝胶在拉伸载荷下通过整体结构形变来分散应力,导致局部应力集中而诱发不可逆的塑性变形。冷冻铸造法已被广泛用于构筑具有取向孔隙结构的气凝胶。由于冰晶沿温度梯度方向生长,传统冷冻铸造只能制备垂直于冷源平面的取向结构;在与冷源平行的面内,冰晶仍处于高度无序状态,导致拉伸过程中无法有效耗散应力。在气凝胶三维空间内实现取向多孔结构仍是一项严峻挑战,也是制约其拉伸性能提升的主要障碍。
文章概述
近日,王双飞院士团队受肌肉纤维取向结构的启发,通过控制冰晶生长开发了一种超拉伸芳纶摩擦电气凝胶。该摩擦电气凝胶的取向拟合度达到98%,是传统冷冻铸造方法的2.6倍。这种有序结构分散了拉应力,使摩擦电气凝胶能够承受539%的拉伸应变。基于这种气凝胶,设计了具有振动反馈功能的摩擦电传感阵列。结合深度学习算法,实现了对驾驶行为的实时监测与振动反馈预警。该研究为智能驾驶系统识别和纠正不安全驾驶行为提供了策略。该项成果以题为“Bioinspired Ultrastretchable Aramid Triboelectric Aerogels for Intelligent Vehicle Seat”发表在国际学术期刊《Advanced Materials》上。博士后迟明超为本文第一作者,聂双喜教授为通讯作者,林梓熙、张松、刘涛、刘艳华、蔡晨晨、罗斌、王金龙、于康、罗启观等参与研究。
图文导读
1. 可拉伸摩擦电气凝胶的设计思路
大自然为制备高性能材料提供了丰富的灵感来源。骨骼肌组织由高度有序排列的肌纤维束构成。肌纤维束包含大量平行于肌肉长轴取向的肌原纤维,这种分级有序结构能够抑制形成局部应力。受骨骼肌有序结构的启发,我们开发了一种具有取向多孔结构的可拉伸芳纶摩擦电气凝胶。利用湿润性限域表面诱导冰晶在亲水区域内优先成核和生长,使气凝胶孔结构的取向拟合度达到98%。有序的孔结构在拉伸过程中能够有效分散应力,使气凝胶实现了539%的极限拉伸应变和706 kPa的拉伸强度。基于这种气凝胶,我们设计了一种适用于汽车座椅、具有振动反馈功能的摩擦电传感阵列。结合深度学习技术,该系统能够实时监测驾驶姿态并提供振动反馈预警。
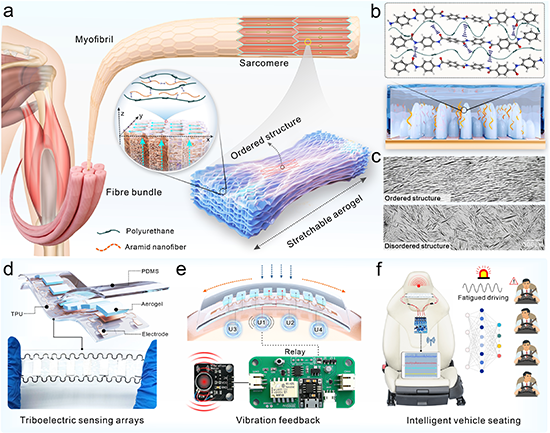
图1. 芳纶纤维气凝胶功能设计及应用
2. 界面润湿性调控机制
湿润性的差异对于冰晶成核顺序至关重要。因此,构建具有取向多孔结构气凝胶的核心挑战在于设计一个具有亲疏水性交替的湿润性限域表面。湿润性限域表面由亲水性的氧化铜和图案化的氟乙烯丙烯共聚物(FEP)组成。处理后的氧化铜的接触角为41°,图案化的FEP薄膜接触角为128°。亲水与疏水区的接触角差达到87°,较大的润湿性差异有利于增加不同区域冰晶成核的时间差。为了直接观察湿润性限域表面的交替湿润性,原位观察了水滴在表面的扩散行为。当液滴沉积到表面时,它没有表现出表面张力形成的典型球形轮廓,而是迅速沿着亲水区向外扩散,这些实验结果共同证实了湿润性限域表面的成功构筑。
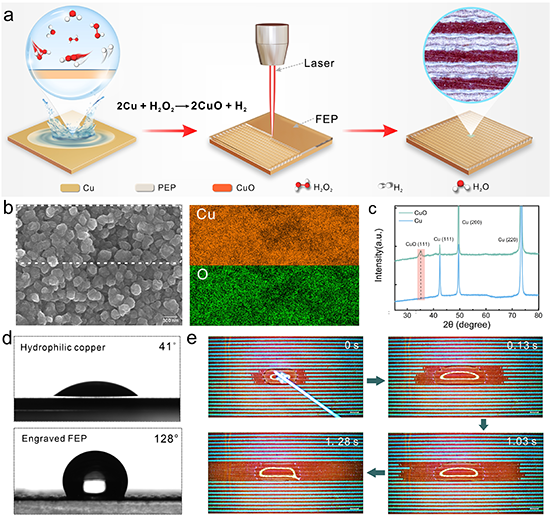
图2. 湿润性限域表面的制备
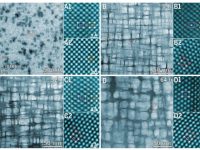
3. 取向结构气凝胶的构筑
为了研究冰晶生长过程,在显微镜下观察了浆料的冷冻过程。在冷冻铸造前,浆料呈现半透明状态,清晰可见底层的湿性限域表面。冷冻铸造过程中,冰晶生长将芳纶纳米纤维和水性聚氨酯(WPU)等聚合物从浆液中挤出至间隙空间,分散液的透明度显著降低,并沉淀成白色聚合物聚集体。冰晶优先在润湿性限域表面的亲水区内成核并生长,直到整个亲水区被填满。由于成核时间滞后,疏水区的冰生长进展较慢。这种差异化的冰生长行为可归因于冷却表面湿润性的变化。为验证受润湿性限域表面在冷冻铸造过程中的有效性,系统分析了气凝胶的微观结构。由受润湿性限域表面构造的气凝胶展现出明显的有序孔隙结构,与传统冷冻铸造产生的无序结构完全不同。
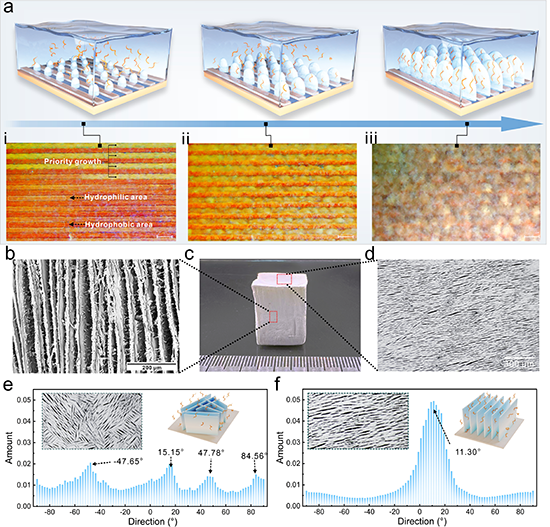
图3. 芳纶纤维气凝胶的微观结构
4. 气凝胶的机械性能
材料的微观结构与其力学性质密切相关。通过应力-应变测试分析了取向结构对气凝胶拉伸性能的影响。在相同的浆料组分下,未经处理的铜片和湿性限域表面分别作为冷基底进行冻铸,分别构筑了无序结构的气凝胶和取向多孔气凝胶。与无序结构气凝胶相比,取向多孔气凝胶的最大拉伸应变从250%提升到539%。这表明取向多孔结构显著提升了气凝胶的可延展性。为进一步突出气凝胶的可拉伸性,将其与成分相似的可拉伸气凝胶进行了比较。结果表明,在最大拉伸应变方面,取向多孔气凝胶显著优于先前报道的气凝胶。此外,系统性比较近期报道的气凝胶基摩擦电材料显示,芳纶摩擦电气凝胶在可拉伸性方面具有明显优势。
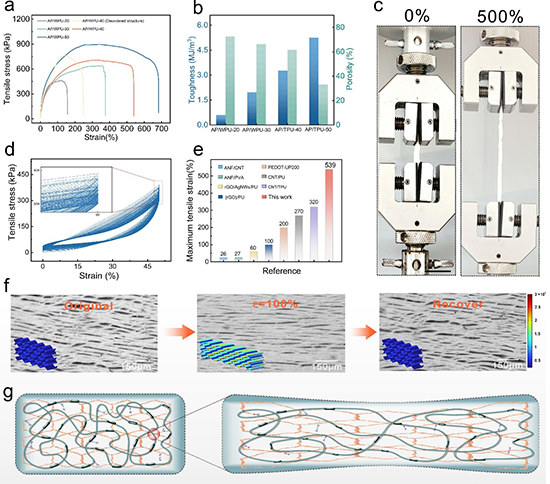
图4. 取向结构气凝胶的机械性能
5. 摩擦电传感阵列的工作机制
可伸缩传感装置可以有效适应汽车座椅的变形,从而精确捕捉驾驶员姿势变化产生的电信号。将可伸缩气凝胶粘附在蛇形电极上,作为正摩擦电材料,而聚二甲基硅氧烷(PDMS)薄膜作为负摩擦电材料,形成带有振动反馈的集成摩擦电传感阵列。采用疏水PDMS封装的摩擦电传感器在潮湿条件下能保持相对稳定的电信号,在长期循环测试中不会出现衰减。基于产生的电信号波形和响应点的空间分布,系统能够有效监测头部运动和姿势。该接口由八个独立层模式的TENG组成(T1–T8),它们被分为四个传感单元(U1:T4–T5;U2:T3,T6;U3:T1–T2;U4:T7–T8)(图5b)。此外,每个感应单元都连接到继电器和振动执行器,单元产生的电压信号控制继电器的切换,产生不同振动模式的机械反馈。
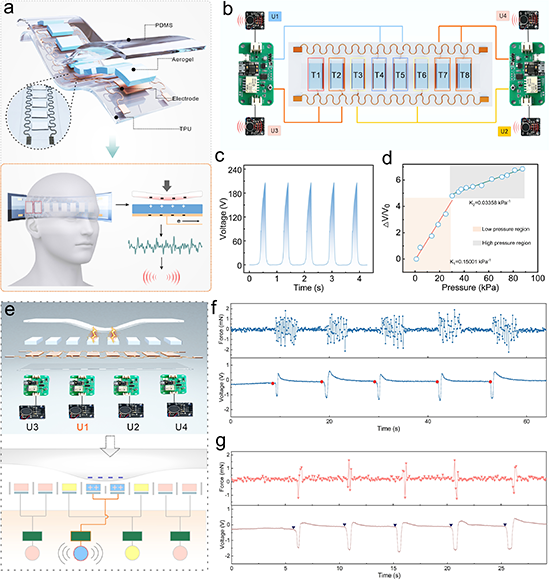
图5. 摩擦电传感阵列的结构及性能
6. 摩擦电传感阵列的应用
随着智能车辆的快速发展,车载传感器在监测疲劳驾驶、环境感知方面发挥着关键作用,并成为汽车智能转型的核心驱动力。为了实现驾驶员姿态的实时监测,一个连接到多通道蓝牙设备的摩擦电传感阵列被集成在安全座椅的三个位置:头枕、左侧和右侧。这形成了一个无线监测系统,用于识别驾驶姿势。传感阵列产生的电信号可通过蓝牙传输至车载智能终端,通过分析以确定驾驶员的姿势。当驾驶员保持直立姿势时,头枕感应界面记录来自两个单元的信号,而左右两侧的所有感应单元则记录来自背部压力的电压信号。当驾驶员疲劳时,会出现低头和前倾等动作,使头枕界面难以检测信号,左右界面的部分单元记录电信号。为进一步提升信号识别准确性,头枕传感器数据采用卷积神经网络(CNN)深度学习方法训练。结果表明基于CNN的模型在头枕运动中实现了平均98%的识别准确率。
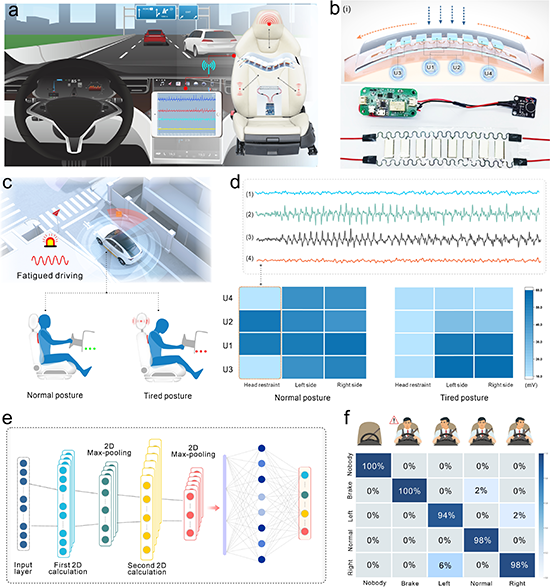
图6. 用于驾驶姿势监测和警报的摩擦电传感阵列
总结
受骨骼肌组织有序结构的启发,本研究通过程序化控制冰晶生长,开发了一种具有取向多孔结构的超可拉伸气凝胶。该气凝胶的孔隙结构实现了98%的最优取向拟合度。有序的孔结构在拉伸过程中有效分散了应力,使其最大拉伸应变达到539%,拉伸强度达到706 kPa。基于这种可拉伸气凝胶,开发了具有振动反馈功能的摩擦电传感阵列。该传感阵列通过无线方式将信号传输至车载终端,用于驾驶姿态的监测与预警。通过集成深度学习技术,该传感阵列对于驾驶员坐姿的平均识别准确率达到98%。这种高拉伸性的取向多孔气凝胶克服了气凝胶固有的弱连接问题,为其在柔性智能传感器中的进一步应用铺平了道路。
原文链接:https://doi.org/10.1002/adma.73549